MPI_Tx_Rx_Coils
The combination of a transmit (also referred to as "drive" and "Tx") and receive ("Rx") coils form the basis of signal production and acquisition in MPI. Drive coils excite the SPIONs within the FOV with high amplitude AC magnetic fields (~8mT at 25kHz) and the receive coil acquires the signal while attenuating signal being generated directly from the drive coils.
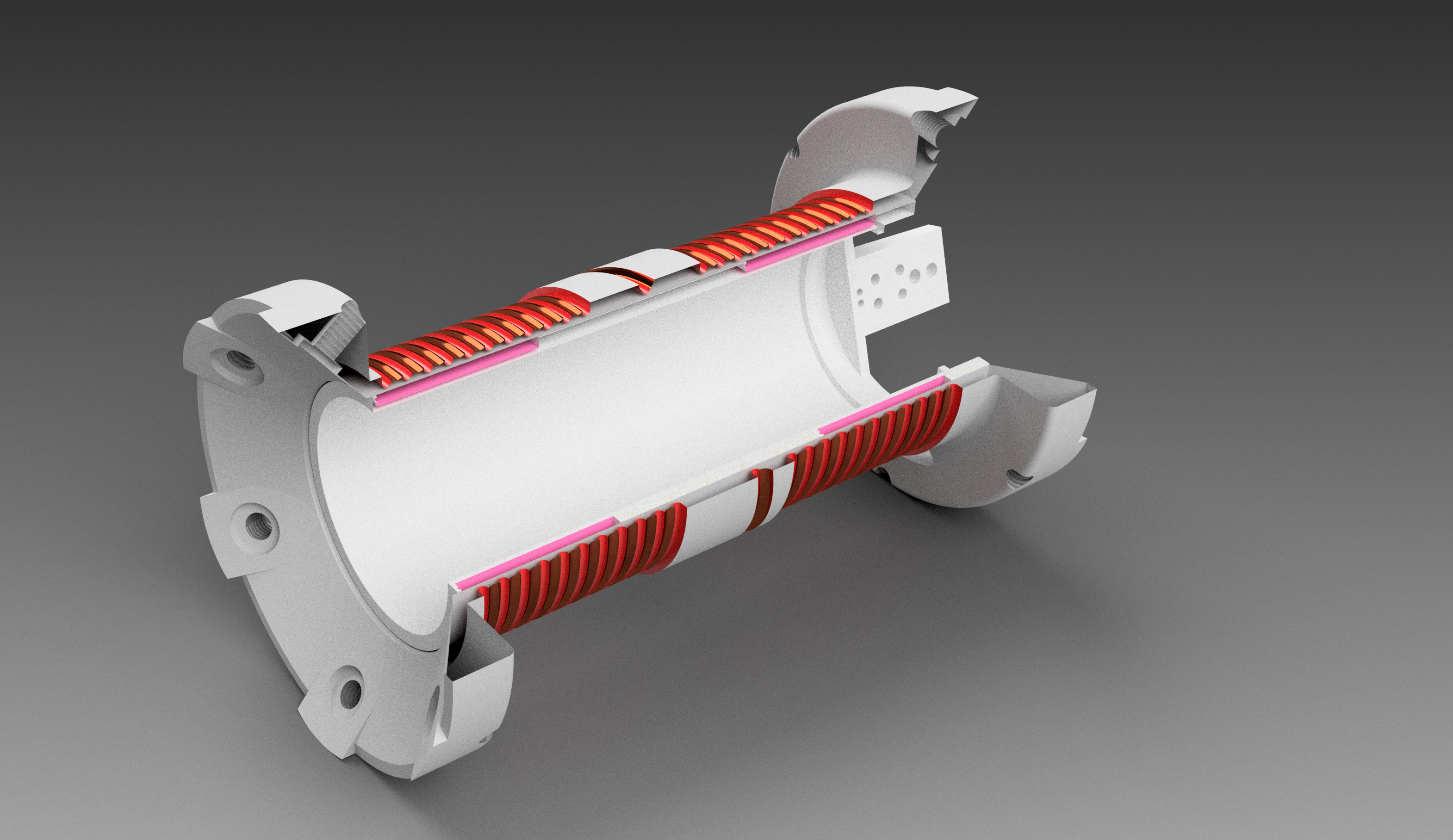
Figure 1: A 3/4 rendering of the Tx/Rx assembly showing the coil arrangement and structural support. The rendering in Inventor caused the structure to appear hollow-- this is not the case, they are 3-D printed with infill.The angled holes are for set-screws to hold it axially and centered in the bore.
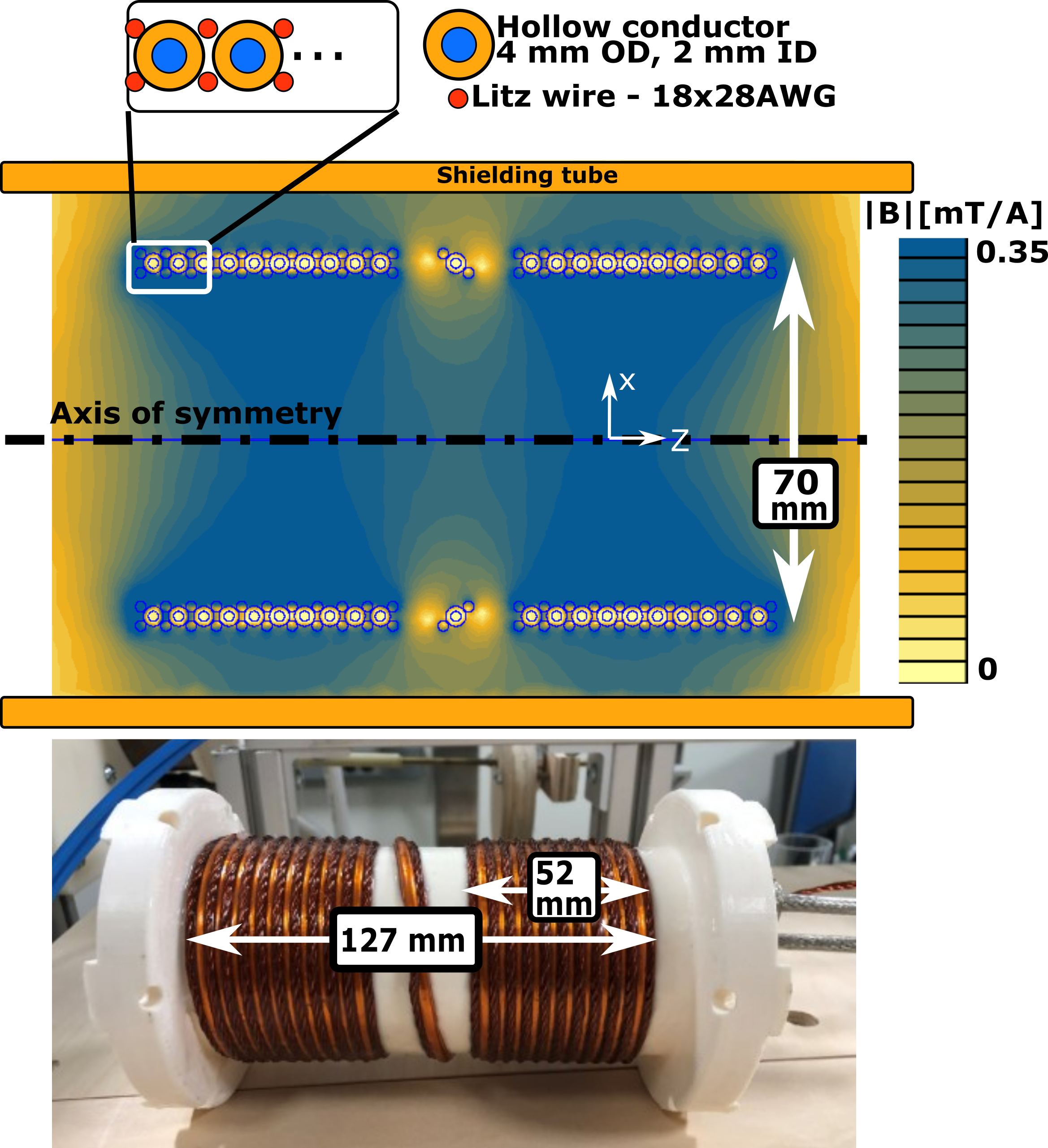
Figure 2: A Cross-section simulation done in FEMM 4.2 as well as a photograph of the coils.

Figure 3: An overview of the drive and received signals. Indicated here is the location of isolating transformers, use of separate grounds, and shielded twisted pairs.
For the following coils, we have an overall free bore diameter of 54 mm. This is to ensure a rat head can fit into our scanner with some room to spare.
To excite the particles within the FOV, the goal of the drive coils is to create a drive field at sufficient amplitude for extended periods of time (assume steady state). The word "sufficient" is intentionally left vague as the drive amplitude is heavily informed by the application. For instance, if you planning on modifying the small-bore imager for minimum power such as Graeser et al. does for their system, a drive field of 6-8mT might be "sufficient"(1). By driving higher amplitudes you gain SNR, but interestingly has been shown to lower spatial resolution(2). Further, if you build the MPS system, it is feasible to characterize the particles you plan to use and then optimize the excitation field amplitude based on those data.
The omnipresent design limitation is heating. Heat is the name of the game with power electromagnet design. With high amplitudes, you can get substantial thermal drift (especially without water cooling) and potentially coil damage if the heat really gets out of hand.
Our current drive coil is cooled by water flowing within the hollow-conductors, and the Litz wires are conduction-cooled to those. Malhotra et al. describe an interesting method for water cooling in their 2019 INSPECT paper(3).
See the page on the filter here.
The Rx coil design should be optimized such that its signal to noise ratio is maximized. The signal is (roughly) proportional to the turn density around the field of view, and the thermal noise is proportional to the resistance. But other noise sources should be considered, and a thorough discussion is of that is published by Zheng et al. (4).
The design we implement uses ~1.2 diameter Litz wires in a solenoid around the FOV. Each half of the gradiometer has two layers totaling 65 turns.
Early in the building process the Rx filter was a component that was significantly debated. It can be designed to resonate at 3f0 to improve the sensitivity of the system (by essentially amplifying the signal at that harmonic), although this approach rejects the other harmonics which contain spatially relevant information. The other approach more often used within the field of MPI is to use a broadband receive chain and a notch filter to reduce drive feedthrough. A third option is to receive broadband without notching out the drive frequency and attenuating it purely by geometric decoupling ('Geometric decoupling' refers to the gradiometer canceling out the homogeneous field at the drive frequency.) with active cancellation further attenuating drive coil feed-through.
We utilize a design which notches the fundamental and passes all frequencies up until about 300kHz, after which an anti-aliasing filter heavily attenuates the signal.
A reference for a successful filter design is here-- presented at IWMPI
For the data presented here, we utilized an amplifier from University Medical Center Hamburg Eppendorf, which utilizes a JFET front-end similar to the one presented here.
In addition, we have developed a low-noise amplifier in house that can be used with our imager. The preamp is loosely based on the design published in (4), in that it takes multiple op-amps in parallel and sums the signal. See Repo for preamp
(1) Graeser et al. Human-sized magnetic particle imaging for brain application, 2019
(2) Croft et al. Low drive field amplitude for improved image resolution in magnetic particle imaging, 2015
(3) Malhotra et al. Tracking the Growth of Superparamagnetic Nanoparticles with an In-Situ Magnetic Particle Spectrometer (INSPECT)
(4) Zheng et al. Optimal Broadband Noise Matching to Inductive Sensors: Application to Magnetic Particle Imaging, DOI: 10.1109/TBCAS.2017.2712566