05 The BluOSEC Android App
The BluOSEC app is still in the beta phase. To install it you have to copy the app as apk file from the Github repo to your smartphone and run it there. Later the app will also be available from the PlayStore... Or maybe not as this is a hobbyists project and hobbyist have little incentive to get involved with all the legal stuff that comes with the PlayStore.
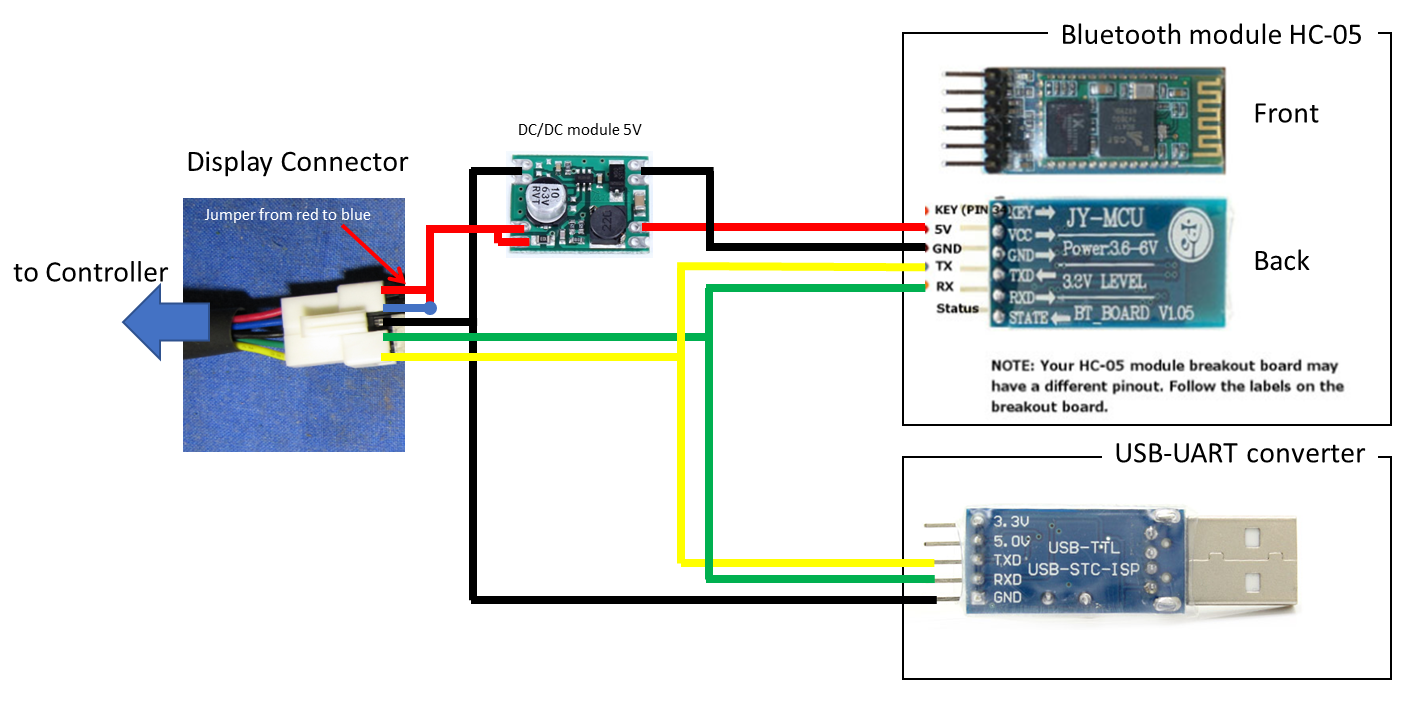
In order to use it you need to buy a cheap blutooth module, for instance a HC-05. Blue and Red wires on the display connector need to be shorted for controller startup, blutooth module needs to be connected as follow: Yellow and Green is Tx/Rx, Black is GND. For 5V you have to buy a tiny 50>5V Buck Converter and connect it to the Red wire. Do NOT connect the module directly to the 36/48V Red wire! Do NOT connect it to any other PAS or throttle Red wire as the controller's internal power supply can't handle that!
First, the Bluetooth module must be paired via the Bluetooth settings menu of the smartphone (not in BluOsec!). The PIN (default 1234) must be entered.
After starting the app, the main screen appears. Here different parameters are displayed live and the support levels can be switched up and down.

- Speed will either display one or two speeds: On the right side is always the primary speed, either derived from the Motor speed, or in case you have an external (or additional) speedsensor from that. The left side is either the GPS based speed, if you have enably GPS in the settings, or the motor speed in case you have the aformentioned external (or additional) speedsensor.
- Current is the current current :)
- Voltage should also be self explanatory
- Current target is the desired current (this display is becoming more and more useless now that we have the debug panel, so it'll probably be replaced with something else)
By swiping vertically over the central area above the level switching buttons you can cycle through a few subviews containing trip infos, hall sensor infos, PAS & throttle as well as motor angle & state infos
By swiping to the right you get to the settings screen. First of all it is important to select the BT module from the list of available BT devices. The setting options are mostly self-explanatory or analogous to the functions in the Java Tool. However, the scaling of the values is not always identical to those in the Java Tool.

- TODO
- TODO
- TODO
- TODO
- TODO
Swiping to the left from the main screen gives you a live view where you can select a lot of additional parameters that can help you optimize and debug your settings.
- Vertical swipe over the trip monitor in the main dashboard shows a hall order and a phase current monitor/diagram
- Enable DC static zero in settings (DO NOT RIDE IN THIS MODE!)
- SLOWLY turn the wheel/motor
- The hall sensor order must be 462315, otherwise you have crossed sensor wires
- A sine wave should build up in the phase current diagram, that's the back emf
- If there is nothing happening in the diagram at all, either your controller is not a sine wave controller (no phase current sensor) or the sensor is shorted with a solder blob (seen on 12FET controllers)
- Look for the angle (y-axis) where it crosses 127 (x-axis) downwards, that's you motor angle -180° (for instance if it crosses at 200°, your motor angle is ~ 200-180=20°)
BluOsec App is a great tool to efficiently finetune motor-parameters for initial motor setup i.e. on a motor test bench. But when actually using the setup / driving, it did not work properly for me: I.e. the controller does not react consistenly / realtime on the throttle input etc. This is also mentioned in the related endless sphere thread: " ...It's known that it freezes sometimes. A bugfix is implemented in the branch Torque from X4. It can be applied to the master also: Avoid float operations and divisions...."