This project is from the course EN530.678.S2018 Nonlinear Control and Planning in Robotics, The Johns Hopkins University. For more information, please visit the course website
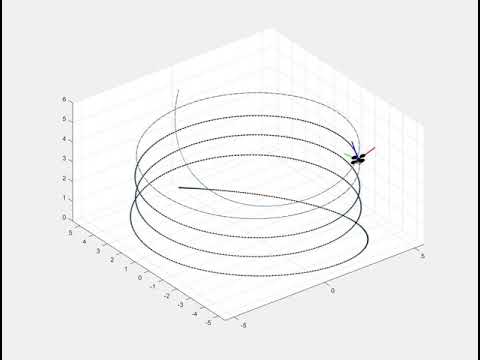
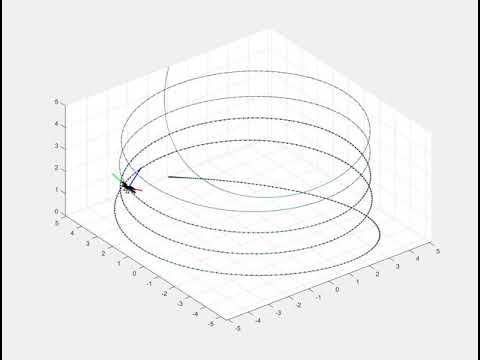
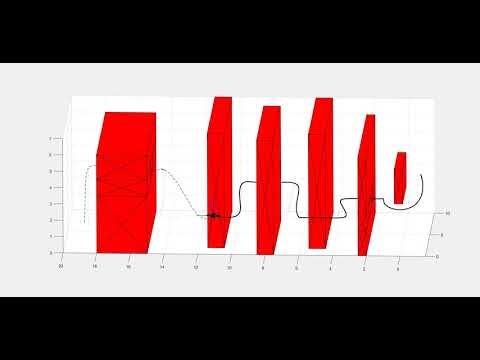
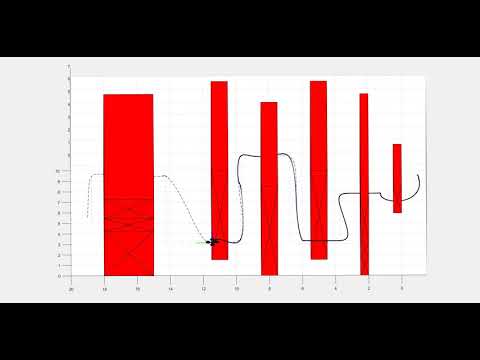
This repository contains MATLAB-based simulation of quadrotor using a geometric controller tracking the trajectory generated by minimum snap optimization.
Main Contributors: Soowon Kim ([email protected](now [email protected])), and Hyungmu Lee ([email protected])
Affiliation: Johns Hopkins University
Please run the main script sequentially in mainsim.m
Low time penalty
High time penalty
No disturbances
With disturbances
Minimum snap trajectory generation and control for quadrotors: https://ieeexplore.ieee.org/abstract/document/5980409
Polynomial Trajectory Planning for Aggressive Quadrotor Flight in Dense Indoor Environments: https://link.springer.com/chapter/10.1007/978-3-319-28872-7_37
Geometric tracking control of a quadrotor UAV on SE(3): https://ieeexplore.ieee.org/abstract/document/5717652
Control of Complex Maneuvers for a Quadrotor UAV using Geometric Methods on SE(3): https://arxiv.org/abs/1003.2005