An implementation of multi-layered stixel computation
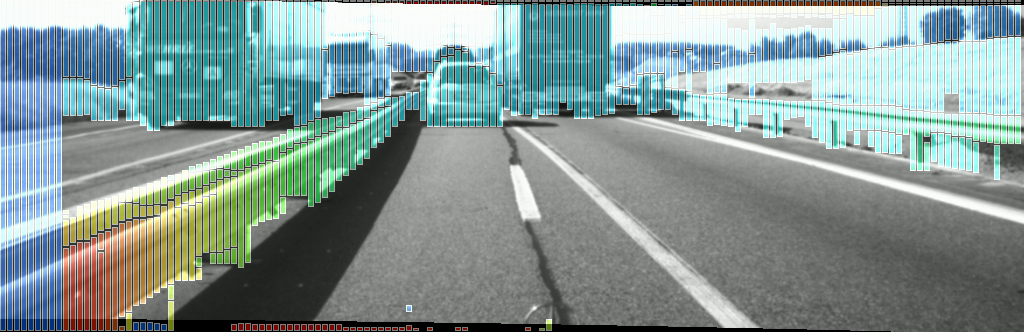
- An implementation of the Multi-Layered Stixel computation based on [1].
- Extracts the Stixels from the input disparity map.
- Allows for multiple Stixels along every column.
- OpenCV
- OpenMP (optional)
$ git clone https://github.com/gishi523/multilayer-stixel-world.git
$ cd multilayer-stixel-world
$ mkdir build
$ cd build
$ cmake ../
$ make
./stixelworld left-image-format right-image-format camera.xml
- left-image-format
- the left image sequence
- right-image-format
- the right image sequence
- camera.xml
- the camera intrinsic and extrinsic parameters
./stixelworld images/img_c0_%09d.pgm images/img_c1_%09d.pgm ../camera.xml
- I tested this work using the Daimler Ground Truth Stixel Dataset
- http://www.6d-vision.com/ground-truth-stixel-dataset
- Setup
| Key | Value |
|---|---|
| CPU | Core-i7 6700K(4.00 GHz/4Core/8T) |
| Disparity size | 128 |
| Stixel width | 7 |
| Scale down factor in image height | 2 |
| OpenMP | ON |
- Stixel computation time
| Image size | Time[milli seconds] |
|---|---|
| 1024 x 333 | 8 |
| 1024 x 440 | 13 |
gishi523