This plugin is intended to resolve some of the functional problems with the old gazebo_ros_pkgs camera plugin:
- Can specify fx and fy directly instead of calculating to FOV.
- Independant horizontal and vertical fx/fy can now be entered.
- cx and cy no longer automatically snap to half the resolution (+0.5 for some reason).
- Camera info and image topics can be named arbitrarily.
- Redundant entry of intrinsics for the actual camera and the camera info (potentially allowing mismatched camera info) has been eliminated.
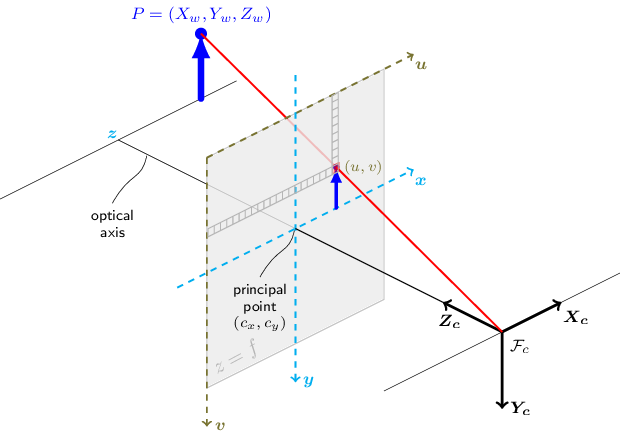
- Camera coordinates now follow the OpenCV axial convention instead of some random other convention.
- Distortion model now matches that used by OpenCV instead of the normalized model Gazebo uses.
{kind=link}
The improved camera plugin requires Gazebo 11 to function fully. Despite the dire warnings on the Gazebo versioning page, anything in cwru_robotics that worked will Gazebo 9 should work with 11, and installation is a one-time process. Simply follow the instructions from OSRF:
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
sudo apt-get update
sudo apt-get install ros-melodic-gazebo11-dev ros-melodic-gazebo11-plugins ros-melodic-gazebo11-ros ros-melodic-gazebo11-ros-control ros-melodic-gazebo11-ros-pkgs
The package also requires OpenCV, cv_bridge, and image_manip:
sudo apt-get install ros-melodic-opencv-apps ros-melodic-cv-bridge
git clone https://github.com/lucasw/image_manip.git
The utility includes a self-contained camera macro to which all of the necessary parameters are passed as arguments. Simply add <xacro:include filename="$(find cwru_ros_camera)/modular_camera.urdf" /> to the beginning of your file to make the macro available, and then call it:
<xacro:cwru_camera
parent="camera_optical_link"
image_topic="/camera/image_raw_color"
info_topic="/camera/camera_info"
k1="-0.433351"
k2=" 0.257538"
k3="-0.090683"
p1=" 0.000512"
p2=" 0.000263"
f_x="1600.0"
f_y="1600.0"
c_x="1152"
c_y="648"
r_u="2304"
r_v="1296"
/>
| Argument | Description |
|---|---|
| parent | The link you want the camera to attach to. |
| image_topic | The ROS topic you want the camera output published to. |
| info_topic | The ROS topic you want the camera info published to (optional). |
| k1 | K1 distortion parameter (optional). |
| k1 | K1 distortion parameter (optional). |
| k2 | K2 distortion parameter (optional). |
| k3 | K3 distortion parameter (optional). |
| p1 | P1 distortion parameter (optional). |
| p2 | P2 distortion parameter (optional). |
| f_x | Horizontal focal length. |
| f_y | Vertical focal length. |
| c_x | Horizontal image center (px). |
| c_y | Vertical image center (px). |
| r_u | Horizontal image size (px). |
| r_v | Horizontal image size (px). |
| rupdate_rate | Maximum framrate the camera will update (in hz). |
An example use can be found in cwru_ros_camera/urdf/test_camera.urdf. It is run automatically by cwru_ros_camera/launch/test_camera.launch.