rviz
Use rviz to visualize Baxter's joints and sensor data.
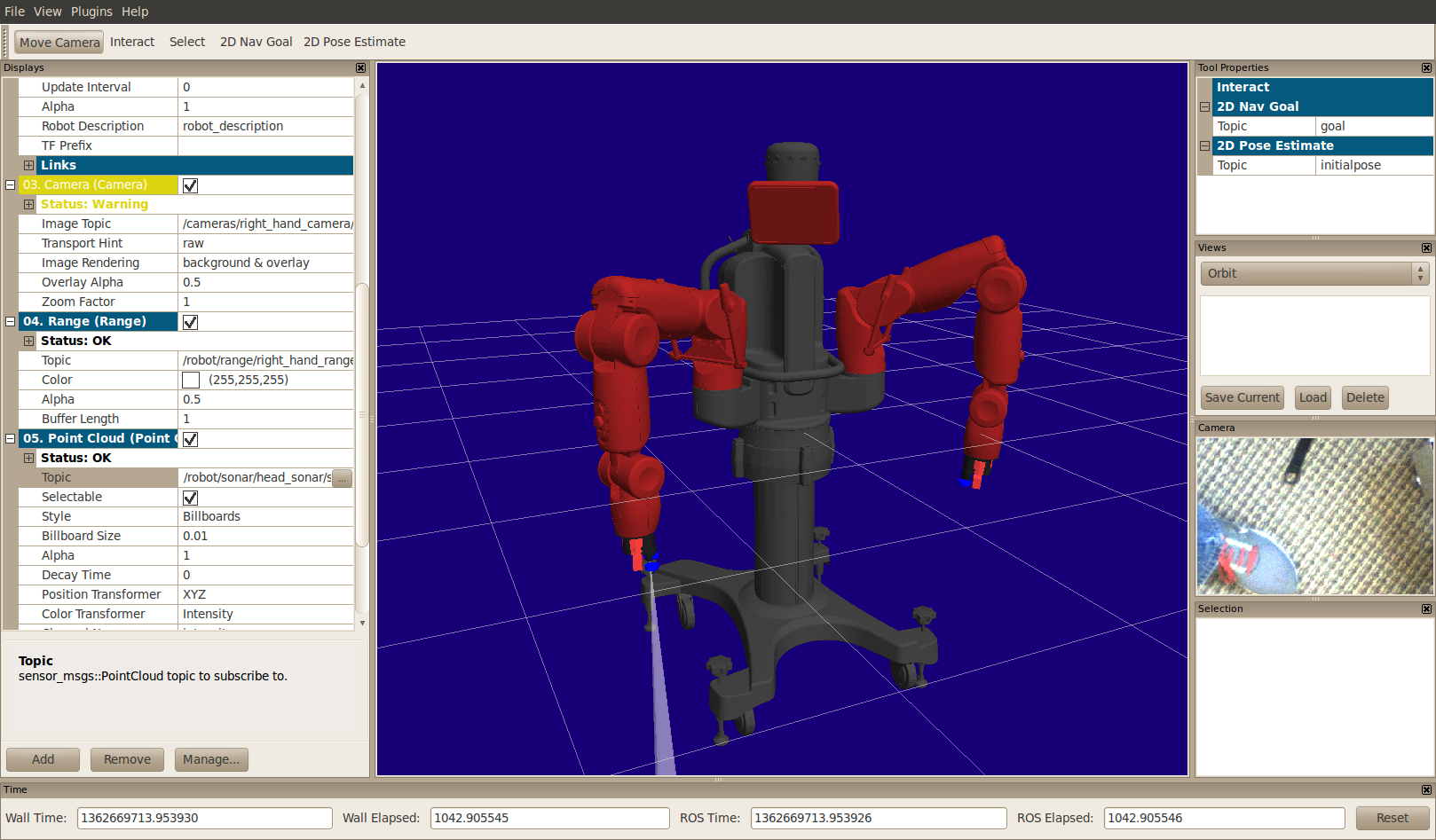
rviz is a 3D visualizer for displaying sensor data and state information from ROS. With rviz, you can visualize Baxter's current pose on a virtual model of the robot. You can also display live representations of sensor values coming over ROS Topics.
Start rviz from an RSDK terminal session using:
$ rosrun rviz rviz &
Use a 'Fixed Frame' of /world, and Add a Robot Model Display Type. Reference the list below (Baxter Display Types) for more sensors.
For common issues specific to using rviz with Baxter, check out the Troubleshooting page.
For more information about rviz, see the original documentation for the tool at the ROS wiki: http://ros.org/wiki/rviz