LoRaWanRelay is a pre-standard open source LoRaWAN battery powered repeater (or network extender) that integrates both the source code of the relay itself and also the source code of the end device (the sensor whose packets are to be relayed to the network by the relay). The code implements to the best of our knwoledge the functionnalities discussed in the relay working group technical proposal.
With the proposed implementation the relay should be able to support up to 16 nodes during 5 years with a battery of 3Ah.
The sensor side stack is essentially a fully compliant loRaWAN 1.0.3 classA Stack with an additionnal Relay specific wake up sequence. The wake-up sequence is transmitted before each LoRaWAN uplink to wake-up the relay. The LoRaWAN uplink is not modified. The sensor normally opens the RX1&RX2 receive slots following its uplink, additionnaly the sensor opens an RX3 slot which is relay mode specific.
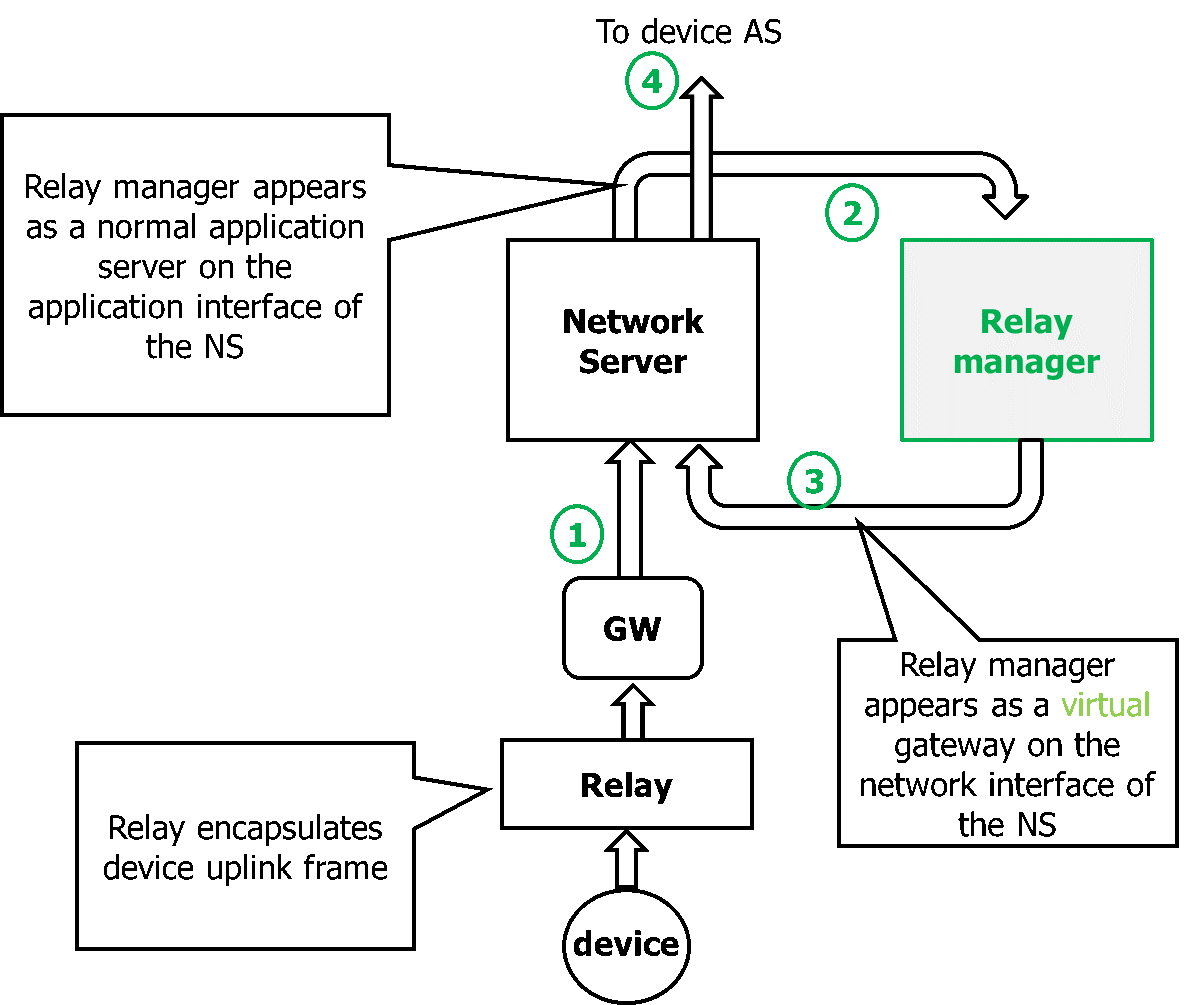
The sensor uplinks can be received both by a standard LoRaWAN network Gateways and also by the relay. If the sensor devAddr is whitelisted in the relay, the relay then forwards the receievd sensor's frame to the network's gateways.
LoRaWanRelay implements a synchronization mechanism between the Relay and the End Device to reduce the power consumption on both side.
Frequency diversity is also implemented to improove the interference robustness.
The communication between the sensor and the relay is secured and authenticated (through a MIC field and a shared key).
The pdf of the slides presented at the TTN conference in Amsterdam is included in the main directory. It is a good idea to go through those slides
The main file of the relay fw project is available here :
https://github.com/LoRaWanRelay/LoRaWanRelay/blob/master/UserCode/MainRelay.cpp
By default the Makefile is configured in Relay Mode for running over a STMicroelectronics Discovery Kit CMWX1ZZABZ.

To compile the source code , you have to install the free gcc-arm-none-eabi package (working both on linux and windows : https://developer.arm.com/open-source/gnu-toolchain/gnu-rm/downloads).
make clean all
The Binary file is available in the repository /build/MiniMouse.bin
The main file of the Sensor code is also available at :
https://github.com/LoRaWanRelay/LoRaWanRelay/blob/master/UserCode/MainRelay.cpp .
The Code has been devlopp for a HW platform who demonstrate some sensor named BezLoc but you can also run this code on the Discovery kit just by changing an option in the Makefile as described below.

RELAY to 0.
make clean all
The Binary file is available in the repository /build/MiniMouse.bin
BOARD_MURATA = 1To Select the Murata Board as Hw Target PlatformRELAY = 1To Activate the Relay FW (set 0 for Sensor Fw )BOARD_WITH_SENSOR = 0To Select BezLoc BoardBOARD_L4 = 0To Select Nucleo Board L4 (not fully tested up to now)RADIO_SX1276 = 1To select Radio Sx1276RADIO_SX1272 = 0To Select Radio Sx1272 ( Not Yet Fully Implemented Cad Not Tested)RADIO_SX126x = 0To Select Radio Sx126x ( Not Yet Fully Implemented Cad Not Tested)DEVICE_UNDER_TEST = 1Set To One for Relay DemoRADIO_WITH_TCX0 = 1Set To One if radio Board embeds a TCXO
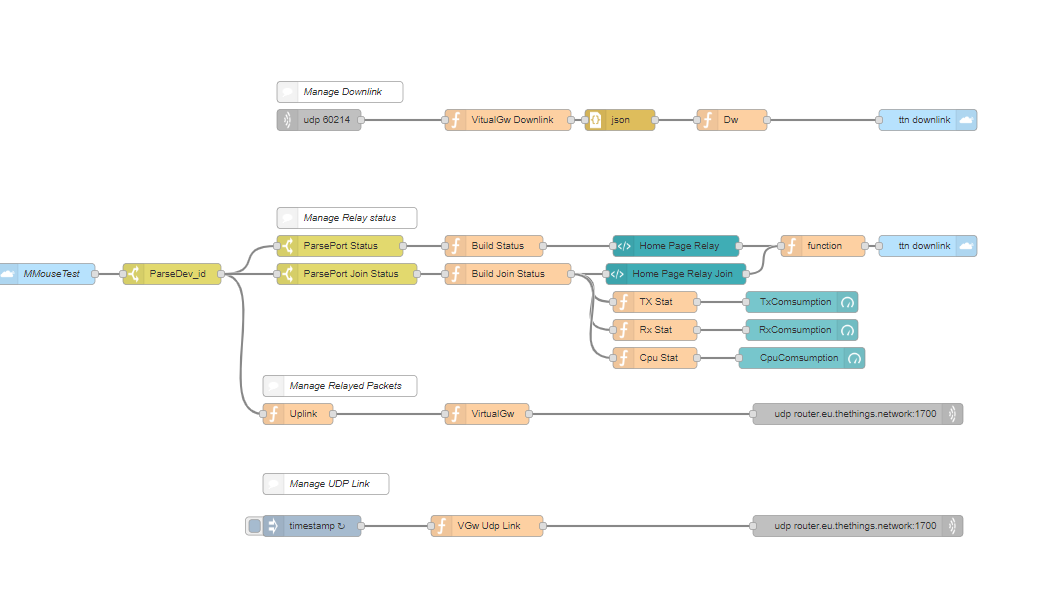
The project also implements a very simple Relay manager running on a Node red Platform connecting to teh TTN network server.
The NodeRed source code is available on the directory /NodeRedSrc
Just Copy It and use Import Clipboard in NodeRed to create your own node red relay manager.
- Install node-red-dashboard to enable the user interface integrated in the node red source code https://www.npmjs.com/package/node-red-dashboard
- Install the TTN node red node : https://www.thethingsnetwork.org/docs/applications/nodered/
- In the Box VirtualGW set your virtual gateway Id, you have to provision a virtual gateway with the same Id in your TTN Console : var gw_id = [0xaa,0x55,0x5a,0x00,0x11,0x11,0x11,0x11];
- In the Box ParseDev_id set the Device Id of your relay as declared in your TTN console (in the example Device Id = relay). The Node Red source code embeds a dashboard , to access it open in your navigator the url : Your_Node-red_Url:1880/ui/
You should see the following dashboard
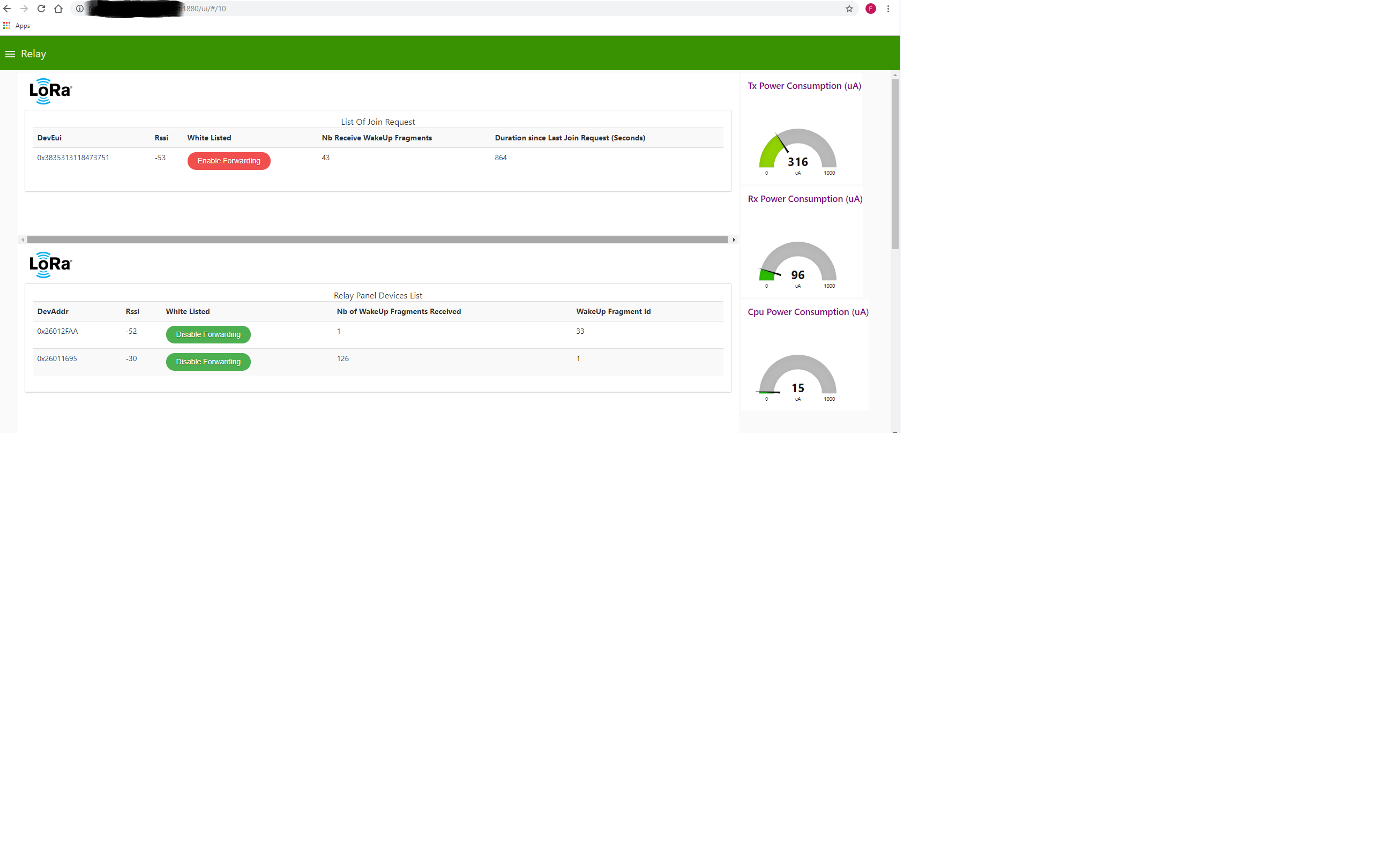
The user can choose to enable/disable the forwarding for each devices already provisioned (devAddr List) or still attempting to join (DevEui List) .
The User Interface provides also the Tx/RX/CPU power consumption updated when a status frame is received.
This project uses the TTN backend as network server
Nothing special to do , by default in the source code the relay is in OTA mode, the LoRaWAN AppKey key has to be modified in the source code in the MainRelay File :
uint8_t LoRaMacNwkSKeyInit[] = { 0x22, 0x33, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11};
uint8_t LoRaMacAppSKeyInit[] = { 0x11, 0x22, 0x22, 0x22, 0x22, 0x22, 0x22, 0x22, 0x22, 0x22, 0x22, 0x22, 0x22, 0x22, 0x22, 0x22};
uint8_t LoRaMacAppKeyInit[] = { 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0x11, 0xBB};
uint8_t AppEuiInit[] = { 0x70, 0xb3, 0xd5, 0x7e, 0xd0, 0x00, 0xff, 0x50 };
uint8_t DevEuiInit2[] = { 0x38, 0x35, 0x31, 0x31, 0x18, 0x47, 0x37, 0x51 };
int i;
uint8_t UserRxFport ;
#ifdef RELAY
uint32_t LoRaDevAddrInit = 0x260114FC;
uint8_t DevEuiInit[] = { 0x38, 0x35, 0x31, 0x31, 0x18, 0x47, 0x37, 0x57 };
sLoRaWanKeys LoraWanKeys = { LoRaMacNwkSKeyInit, LoRaMacAppSKeyInit, LoRaMacAppKeyInit, AppEuiInit, DevEuiInit, LoRaDevAddrInit,OTA_DEVICE };
#else
uint8_t UserFport = 3 ;
uint32_t LoRaDevAddrInit = 0x26011695;
sLoRaWanKeys LoraWanKeys = { LoRaMacNwkSKeyInit, LoRaMacAppSKeyInit, LoRaMacAppKeyInit, AppEuiInit, DevEuiInit2, LoRaDevAddrInit,APB_DEVICE };
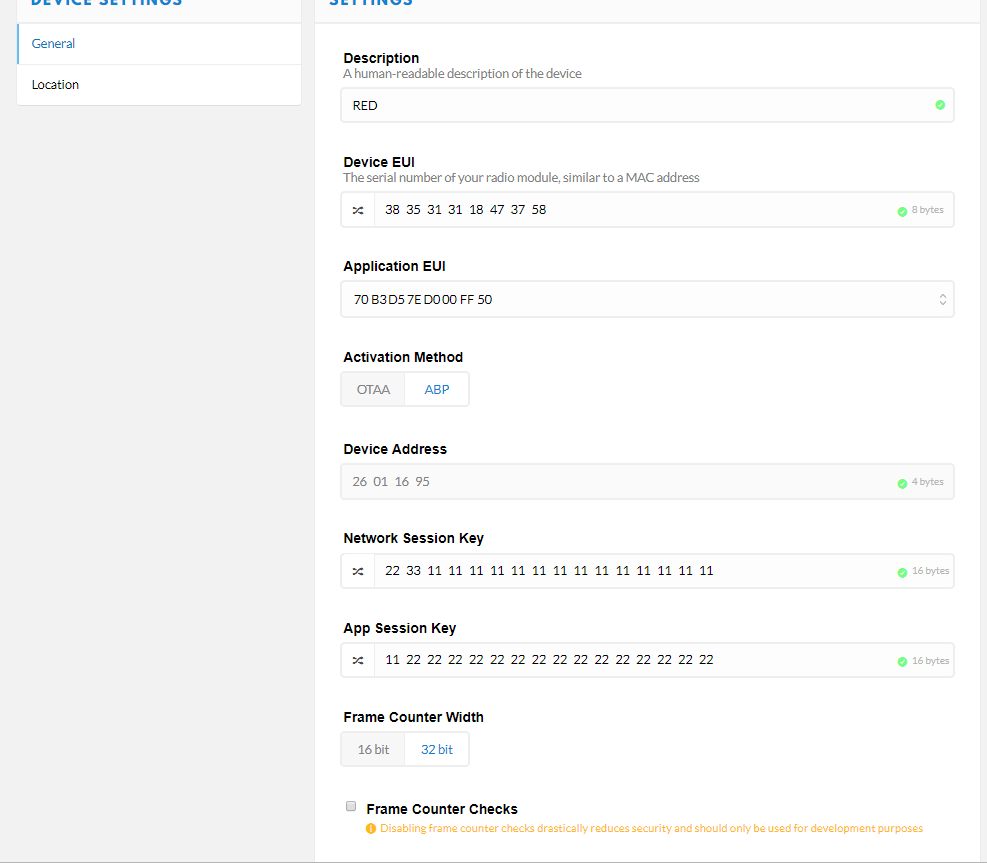
#endif Provision the sensor as usual on the TTN Backend , can be either in OTA mode or in ABP mode.
For demo purpose, disable Frame counter checks (as on the figure below), this way you should see on your TTN data console the packets received twice : first time by the LoRaWAN GATEWAY as Usual and a second time by the "Virtual Gateway" (the relay)
Configure a new gateway on ttn dashboard with the same DevEUI as one inside your NodeRed dashboard , enable the option :
I'm using the legacy packet forwarder Select this if you are using the legacy Semtech packet forwarder.
How do you verify that everything is running?
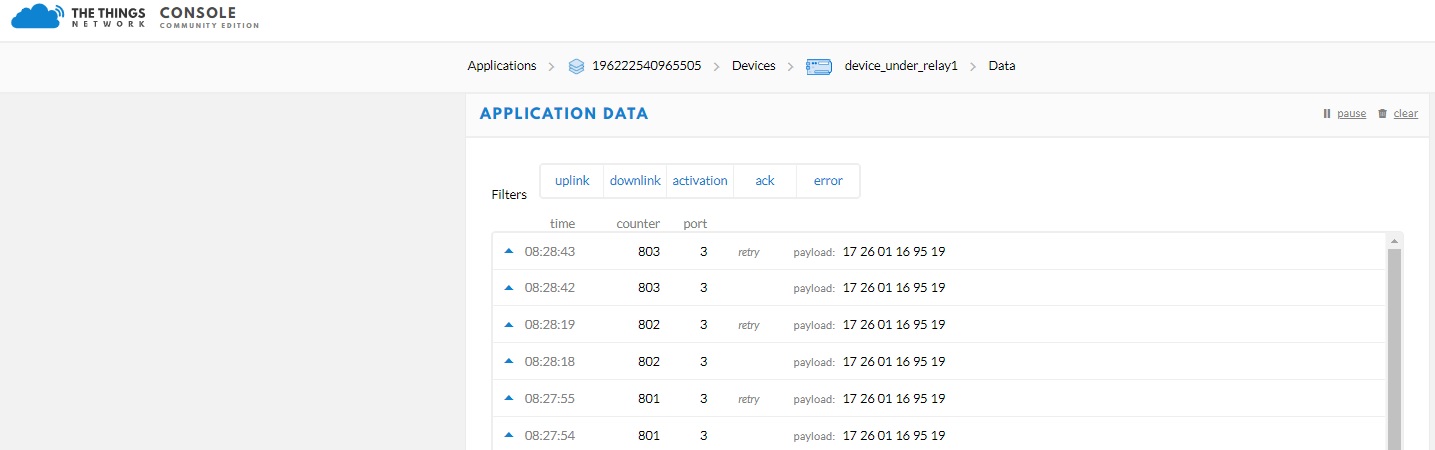
- You can verify that the sensor is received both by the Normal Gateway but also by the virtual gateway.
Go to the device's TTN console, the uplink should be received twice and appear with the mention retry :
- Downlink check : the sensor is configured to retransmit all the applicative downlink in it next uplink. So each time the sensor will received a downlink , the next uplink inside the ttn console should be a copy of the downlink.
- When a new node is starting for the first time, it will appear in the node red UI console with the mention 'Enable Forwarding'
That means that the relay has seen the sensor but is still not relaying the packets of this sensor.
If you enable forwarding , the sensor become white-listed and the packet start to be relayed.
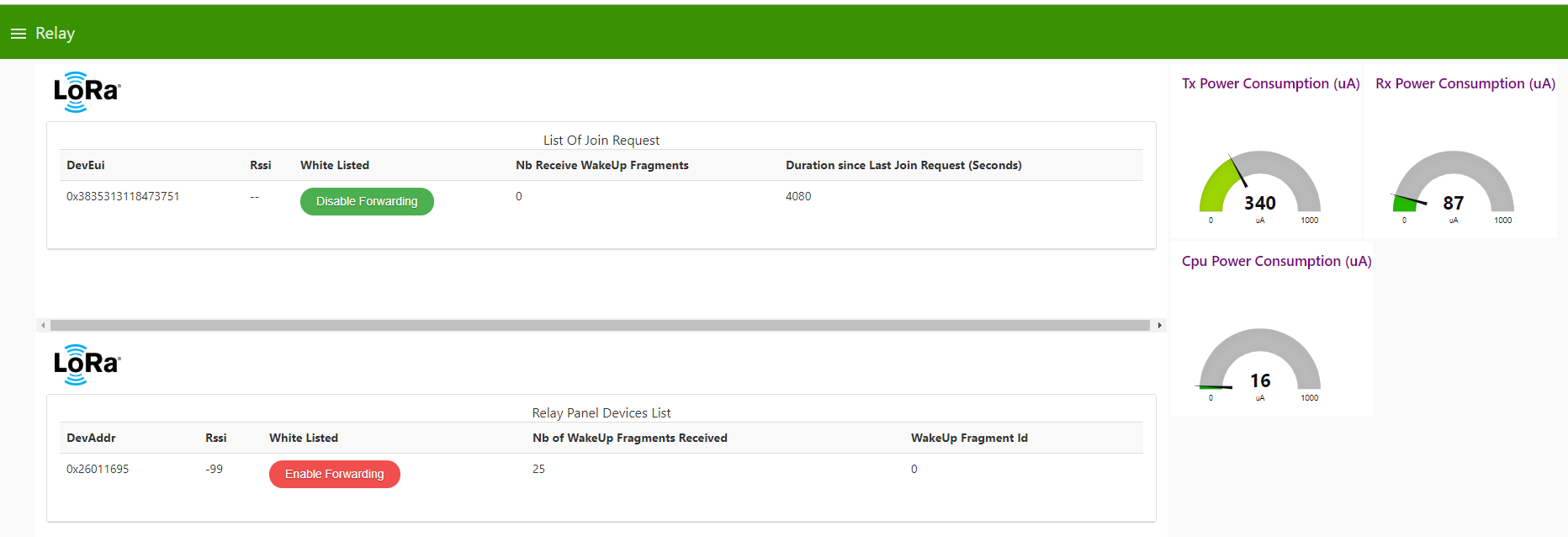
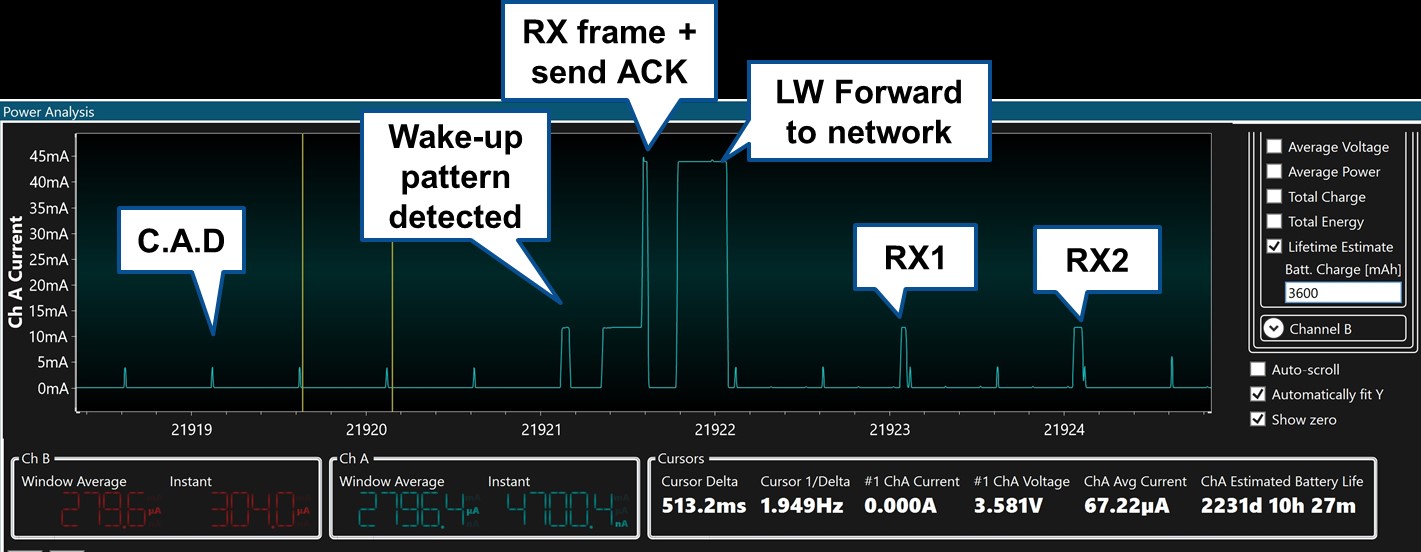
The relay power consumption provides a lots of informations :
The following picture describes the different states of a relay device :