
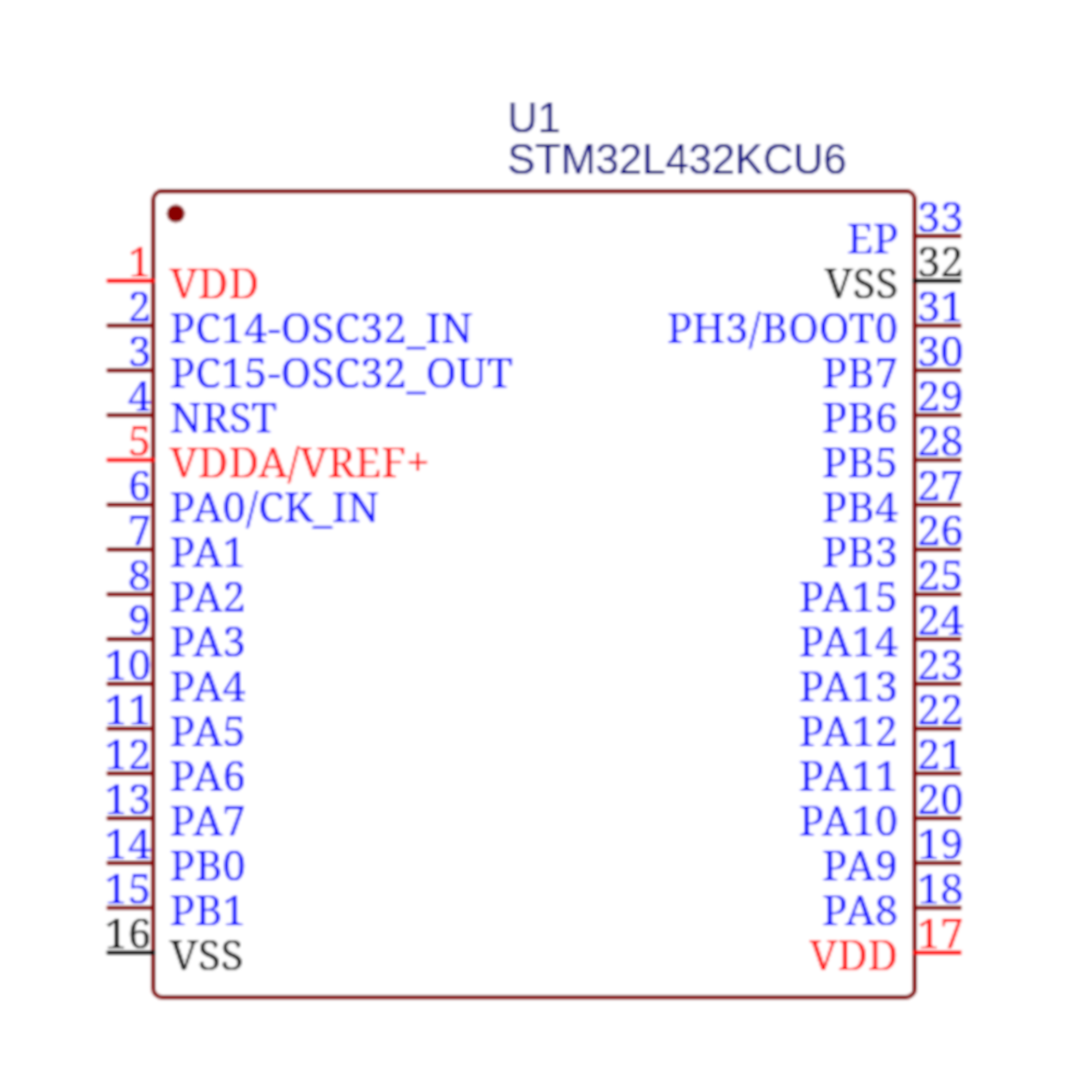
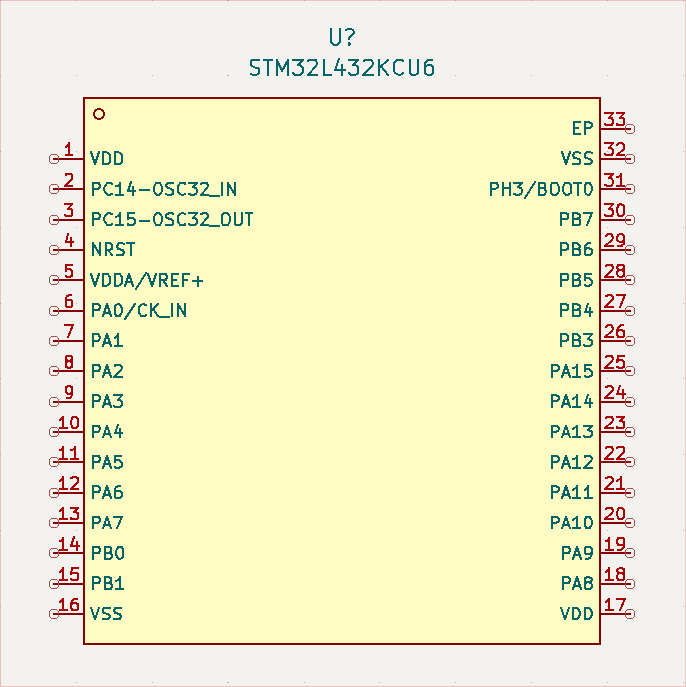
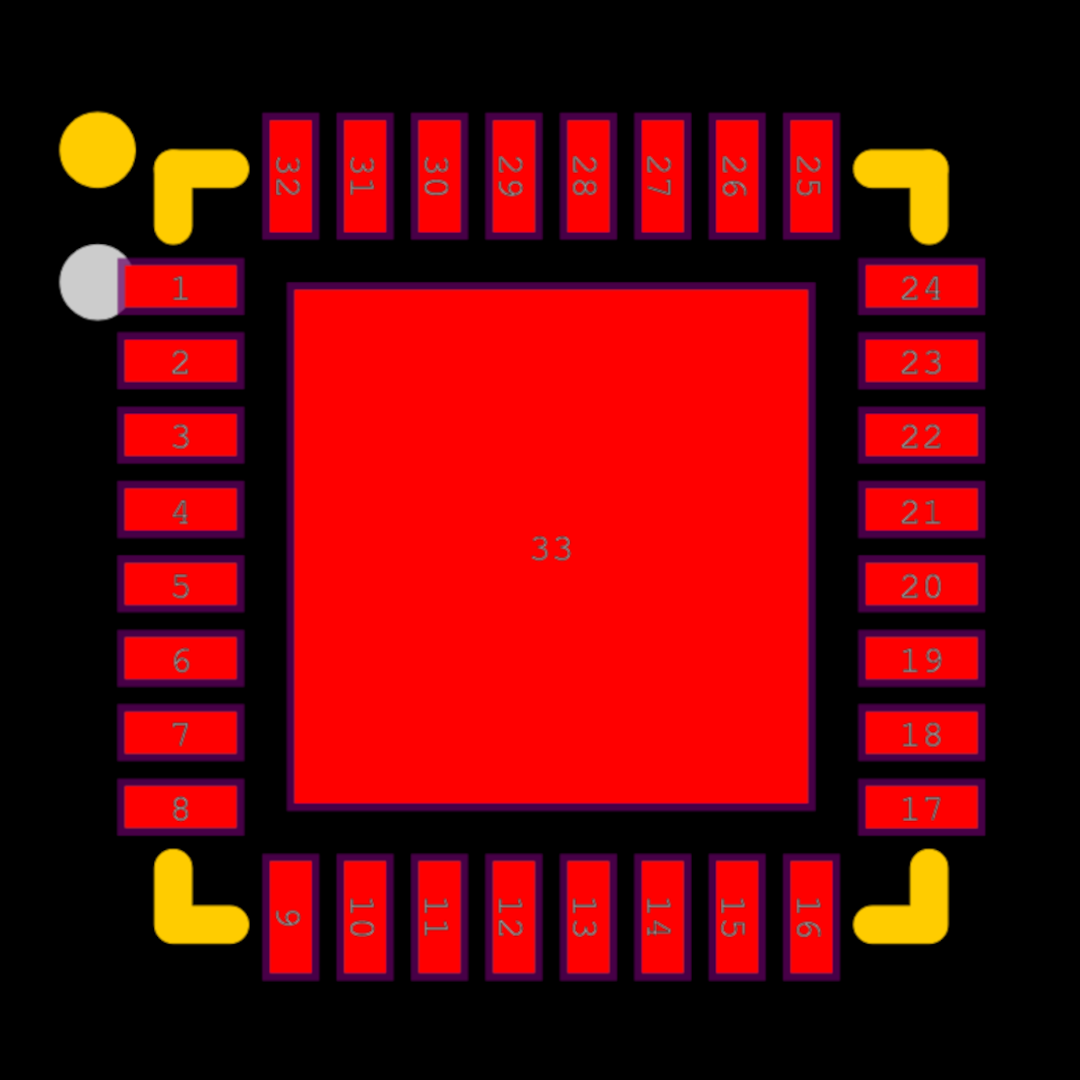
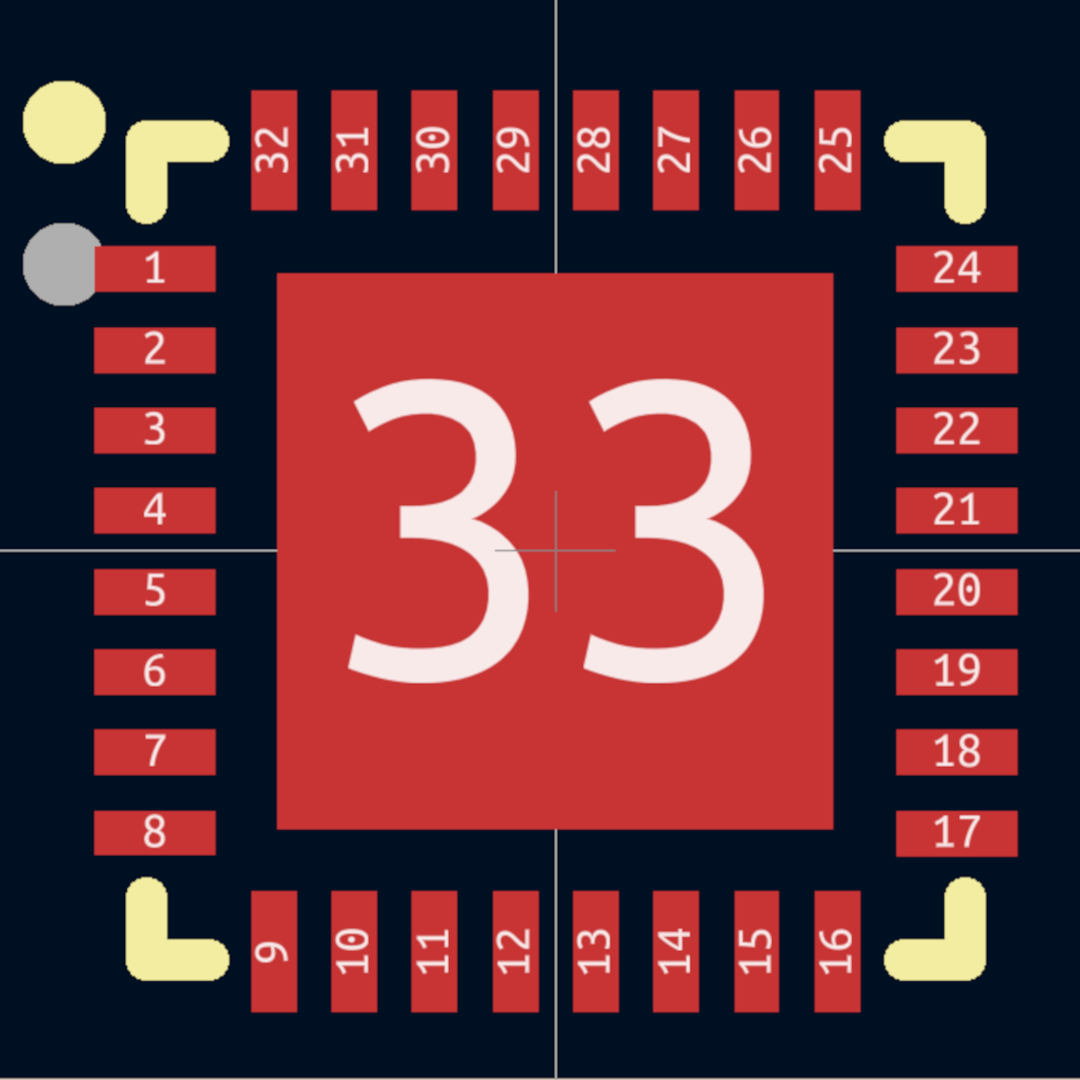
JLC2KiCadLib is a python script that generate a component library (symbol, footprint and 3D model) for KiCad from the JLCPCB/easyEDA library. This script requires Python 3.6 or higher.
| easyEDA origin | KiCad result |
|---|---|
 |
 |
 |
 |
 |
 |
Install using pip:
pip install JLC2KiCadLib
Install from source:
git clone https://github.com/TousstNicolas/JLC2KiCad_lib.git
cd JLC2KiCad_lib
pip install .
usage: JLC2KiCadLib [-h] [-dir OUTPUT_DIR] [--no_footprint] [--no_symbol] [-symbol_lib SYMBOL_LIB] [-footprint_lib FOOTPRINT_LIB]
[-models [{STEP,WRL} ...]] [--skip_existing] [-model_base_variable MODEL_BASE_VARIABLE]
[-logging_level {DEBUG,INFO,WARNING,ERROR,CRITICAL}] [--log_file] [--version]
JLCPCB_part_# [JLCPCB_part_# ...]
take a JLCPCB part # and create the according component's kicad's library
positional arguments:
JLCPCB_part_# list of JLCPCB part # from the components you want to create
options:
-h, --help show this help message and exit
-dir OUTPUT_DIR base directory for output library files
--no_footprint use --no_footprint if you do not want to create the footprint
--no_symbol use --no_symbol if you do not want to create the symbol
-symbol_lib SYMBOL_LIB
set symbol library name, default is "default_lib"
-symbol_lib_dir SYMBOL_LIB_DIR
Set symbol library path, default is "symbol" (relative to OUTPUT_DIR)
-footprint_lib FOOTPRINT_LIB
set footprint library name, default is "footprint"
-models [{STEP,WRL} ...]
Select the 3D model you want to use. Default is STEP.
If both are selected, only the STEP model will be added to the footprint (the WRL model will still be generated alongside the STEP model).
If you do not want any model to be generated, use the --models without arguments
-model_dir MODEL_DIR Set directory for storing 3d models, default is "packages3d" (relative to FOOTPRINT_LIB)
--skip_existing use --skip_existing if you want do not want to replace already existing footprints and symbols
-model_base_variable MODEL_BASE_VARIABLE
use -model_base_variable if you want to specify the base path of the 3D model using a path variable
-logging_level {DEBUG,INFO,WARNING,ERROR,CRITICAL}
set logging level. If DEBUG is used, the debug logs are only written in the log file if the option --log_file is set
--log_file use --log_file if you want logs to be written in a file
--version Print versin number and exit
exemple use :
JLC2KiCadLib C1337258 C24112 -dir My_lib -symbol_lib My_Symbol_lib --no_footprint
The only required arguments are the JLCPCP_part number (e.g. Cxxxxx)
Example usage :
JLC2KiCadLib C1337258 C24112 -dir My_lib \
-model_dir My_model_dir \
-footprint_lib My_footprint_lib \
-symbol_lib_dir My_symbol_lib_dir \
-symbol_lib My_symbol_lib
This example will create the symbol, footprint and 3D model for the two components specified and will output the symbol in the ./My_lib/symbol/My_symbol_lib.lib file, the footprint and 3D model will be created in the ./My_lib/Footprint. This will result in the following tree to be created :
My_lib
├── My_footprint_lib
│ ├── My_model_dir
│ │ ├── QFN-24_L4.0-W4.0-P0.50-BL-EP2.7.step
│ │ └── VQFN-48_L7.0-W7.0-P0.50-BL-EP5.5.step
│ ├── QFN-24_L4.0-W4.0-P0.50-BL-EP2.7.kicad_mod
│ └── VQFN-48_L7.0-W7.0-P0.50-BL-EP5.5.kicad_mod
└── My_symbol_lib_dir
└── My_symbol_lib.kicad_sym
Most of those arguments are optional. The only required argument is the JLCPCB part #.
The JLCPCB part # is found in the part info section of every component in the JLCPCB part library.
By default, the library folder will be created in the execution directory. You can specify an absolute path with the -dir option.
JLC2KiCadLib relies on the KicadModTree framework to generate the footprints.
- Even so I tested the script on a lot of components, be careful and always check the output footprint and symbol.
- I consider this project completed. I will continue to maintain it if a bug report is filed, but I will not develop new functionality in the near future. If you feel that an important feature is missing, please open an issue to discuss it, then you can fork this project with a new branch before submitting a PR.
Copyright © 2021 TousstNicolas
The code is released under the MIT license