{kind=link}
This matlab code implements the discontinuous and continuous double support DCM trajectories as described in the following paper
Englsberger, Johannes, Christian Ott, and Alin Albu-Schäffer.
"Three-dimensional bipedal walking control based on divergent component of motion."
IEEE Transactions on Robotics 31.2 (2015): 355-368.
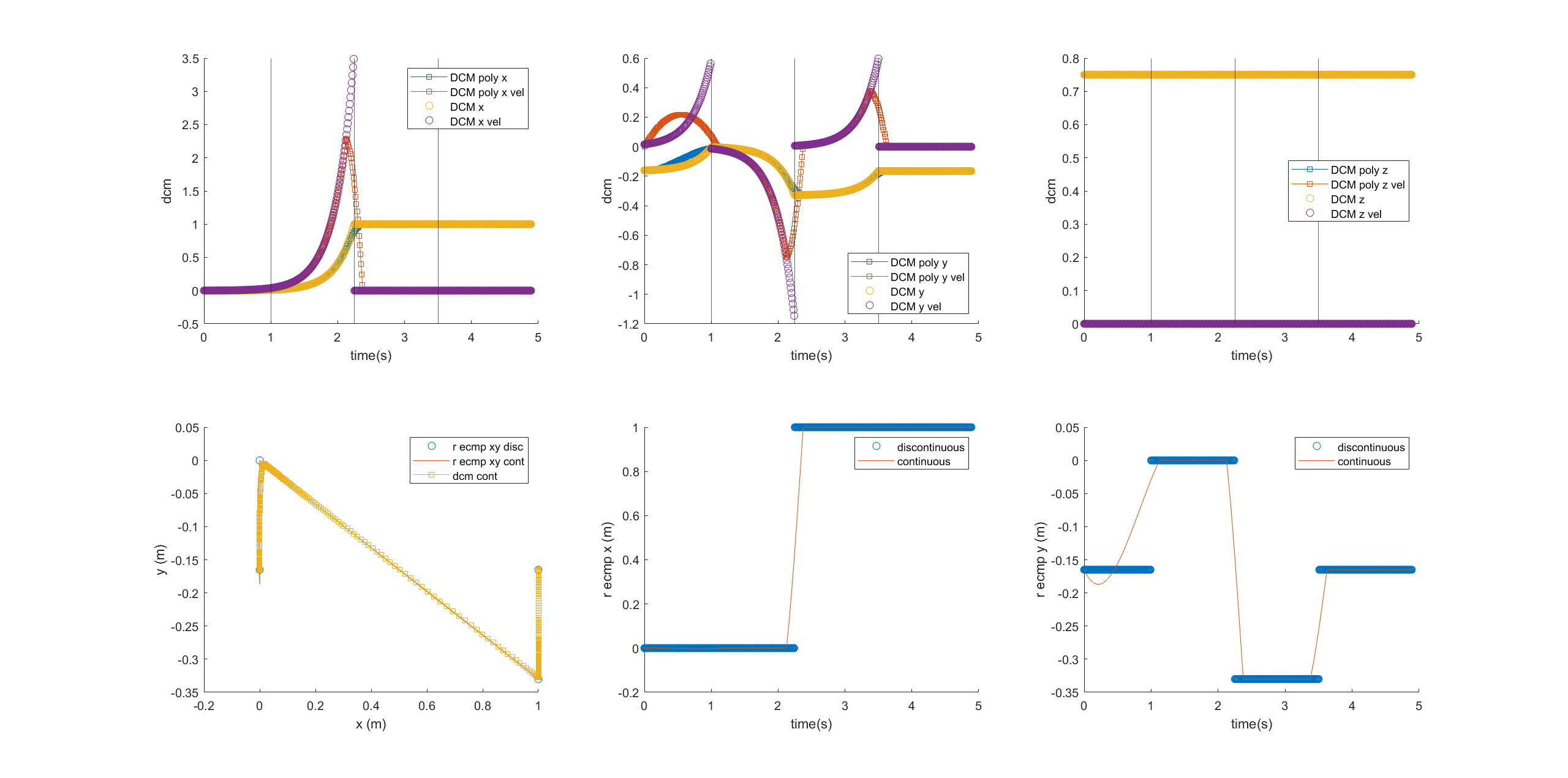
In matlab, run the file dcm_test.m to visualize the DCM trajectories
The dcm_test.m MATLAB script produces the following plots: