- Thiemo Wiedemeyer <[email protected]>, Institute for Artificial Intelligence, University of Bremen
Please read this README and the ones of the individual components throughly before asking questions. We get a lot of repeated questions, so when you have a problem, we urge everyone to check the github issues (including closed ones). Your issue is very likely discussed there already.
The goal of this project is to give you a driver and the tools needed to receive data from the Kinect-2 sensor, in a way useful for robotics. You will still need to know how to use ROS to make use of it. Please follow the ROS tutorials. You will also need to learn how to work with point-clouds, or depth-clouds, or images (computer vision) to do useful things with the data.
Note: Please use the GitHub issues for questions and problems regarding the iai_kinect2 package and its components. Do not write emails.
This is a collection of tools and libraries for a ROS Interface to the Kinect One (Kinect v2).
It contains:
- a calibration tool for calibrating the IR sensor of the Kinect One to the RGB sensor and the depth measurements
- a library for depth registration with OpenCL support
- the bridge between libfreenect2 and ROS
- a viewer for the images / point clouds
First you should look at this FAQ and the FAQ from libfreenect2. Secondly, look at issue page from libfreenect2 and the issue page of iai_kinect2 for similar issues and solutions.
Point clouds are only published when the launch file is used. Make sure to start kinect2_bridge with roslaunch kinect2_bridge kinect2_bridge.launch.
Short answer: No.
Long answer: Yes, it is possible to compile this package with OpenCV 3.0, but it will not work. This is because cv_bridge is used, which itself is compiled with OpenCV 2.4.x in ROS Indigo/Jade and linking against both OpenCV versions is not possible. Working support for OpenCV 3.0 might come with a future ROS release.
There are many reasons why kinect2_bridge might not working. The first thing to find out whether the problem is related to kinect2_bridge or libfreenect2.
A good tool for testing is Protonect, it is a binary located in libfreenect2/build/bin/Protonect.
It uses libfreenect2 directly with a minimal dependency on other libraries, so it is a good tool for the first tests.
Execute:
./Protonect glto test OpenGL support../Protonect clto test OpenCL support../Protonect cputo test CPU support.
Before running kinect2_bridge please make sure Protonect is working and showing color, depth and ir images.
If some of them are black, than there is a problem not related to kinect2_bridge and you should look at the issues from the libfreenect2 GitHub page for help.
If one of them works, try out the one that worked with kinect2_bridge: rosrun kinect2_bridge kinect2_bridge _depth_method:=<opengl|opencl|cpu>.
You can also change the registration method with _reg_method:=<cpu|opencl>.
If that is the case, you have to make sure that Protonect uses the same version of libfreenect2 as kinect2_bridge does.
To do so, run make and sudo make install in the build folder again. And try out kinect2_bridge again.
cd libfreenect2/build
make & sudo make install
Also make sure that you are not using OpenCV 3.0.
If it is still crashing, compile it in debug and run it with gdb:
cd <catkin_ws>
catkin_make -DCMAKE_BUILD_TYPE="Debug"
cd devel/lib/kinect2_bridge
gdb kinect2_bridge
// inside gdb: run until it crashes and do a backtrace
run
bt
quit
Open an issue and post the problem description and the output from the backtrace (bt).
This is the normal behavior. 'kinect2_bridge' will only process data when clients are connected (ROS nodes listening to at least one of the topics).
This saves CPU and GPU resources. As soon as you start the kinect_viewer or rostopic hz on one of the topics, processing should start.
rosdep will output errors on not being able to locate [kinect2_bridge] and [kinect2_registration].
That is fine because they are all part of the iai_kinect2 package and rosdep does not know these packages.
This indicates problems with the USB connection.
First of all, check the issue pages on GitHub for similar issues, as they might contain solutions for them.
By default you will only see the open issues, but if you click on closed you will the the ones solved. There is also a search field which helps to find similar issues.
If you found no solution in the issues, feel free to open a new issue for your problem. Please describe your problem in detail and provide error messages and log output.
- ROS Hydro/Indigo
- OpenCV (2.4.x, using the one from the official Ubuntu repositories is recommended)
- PCL (1.7.x, using the one from the official Ubuntu repositories is recommended)
- Eigen (optional, but recommended)
- OpenCL (optional, but recommended)
- libfreenect2 (>= v0.2.0, for stability checkout the latest stable release)
-
Install the ROS. Instructions for Ubuntu 14.04
-
Install libfreenect2:
Follow the instructions and enable C++11 by using
cmake .. -DENABLE_CXX11=ONinstead ofcmake ..If something is not working, check out the latest stable release, for example
git checkout v0.2.0. -
Clone this repository into your catkin workspace, install the dependencies and build it:
cd ~/catkin_ws/src/
git clone https://github.com/code-iai/iai_kinect2.git
cd iai_kinect2
rosdep install -r --from-paths .
cd ~/catkin_ws
catkin_make -DCMAKE_BUILD_TYPE="Release"
Note: rosdep will output errors on not being able to locate [kinect2_bridge] and [depth_registration].
That is fine because they are all part of the iai_kinect2 package and rosdep does not know these packages.
Note: If you installed libfreenect2 somewhere else than in $HOME/freenect2 or a standard location like /usr/local
you have to specify the path to it by adding -Dfreenect2_DIR=path_to_freenect2/lib/cmake/freenect2 to catkin_make.
- Connect your sensor and run
kinect2_bridge:
roslaunch kinect2_bridge kinect2_bridge.launch
- Calibrate your sensor using the
kinect2_calibration. Further details - Add the calibration files to the
kinect2_bridge/data/<serialnumber>folder. Further details - Restart
kinect2_bridgeand view the results usingrosrun kinect2_viewer kinect2_viewer kinect2 sd cloud.
Install the latest version of the AMD Catalyst drivers from https://support.amd.com and follow the instructions. Also install opencl-headers.
sudo apt-get install opencl-headers
Go to developer.nvidia.com/cuda-downloads and select linux, x86_64, Ubuntu, 14.04, deb(network).
Download the file and follow the instructions. Also install nvidia-modprobe and opencl-headers.
sudo apt-get install nvidia-modprobe opencl-headers
You also need to add CUDA paths to the system environment, add these lines to you ~/.bashrc:
export LD_LIBRARY_PATH="/usr/local/cuda/lib64:${LD_LIBRARY_PATH}"
export PATH="/usr/local/cuda/bin:${PATH}"
A system-wide configuration of the libary path can be created with the following commands:
echo "/usr/local/cuda/lib64" | sudo tee /etc/ld.so.conf.d/cuda.conf
sudo ldconfig
You can either install a binary package from a PPA like ppa:floe/beignet, or build beignet yourself. It's recommended to use the binary from the PPA.
sudo add-apt-repository ppa:floe/beignet && sudo apt-get update
sudo apt-get install beignet beignet-dev opencl-headers
If you used iai_kinect2 for your work, please cite it.
@misc{iai_kinect2,
author = {Wiedemeyer, Thiemo},
title = {{IAI Kinect2}},
organization = {Institute for Artificial Intelligence},
address = {University Bremen},
year = {2014 -- 2015},
howpublished = {\url{https://github.com/code-iai/iai\_kinect2}},
note = {Accessed June 12, 2015}
}The result should look something similar to this (may depend on the bibliography style used):
T. Wiedemeyer, “IAI Kinect2,” https://github.com/code-iai/iai_kinect2,
Institute for Artificial Intelligence, University Bremen, 2014 – 2015,
accessed June 12, 2015.
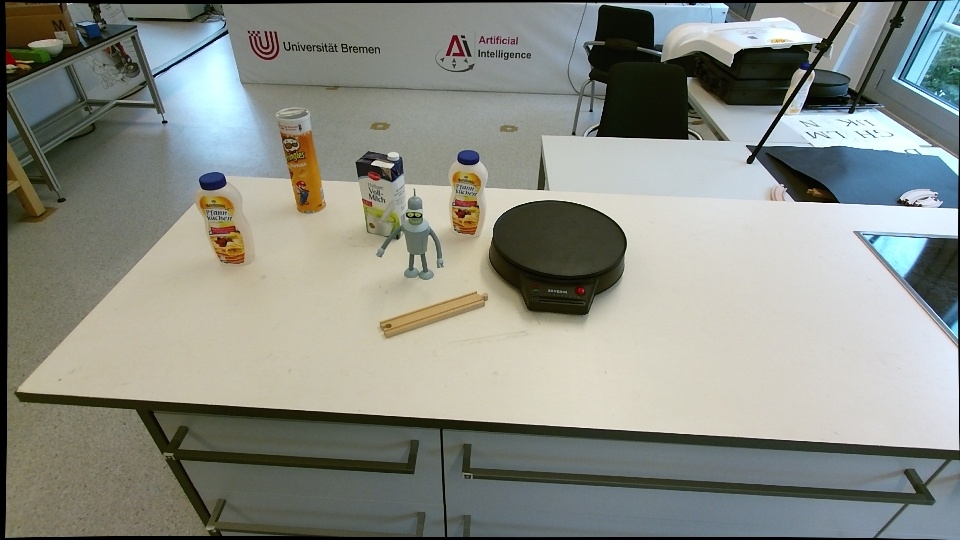
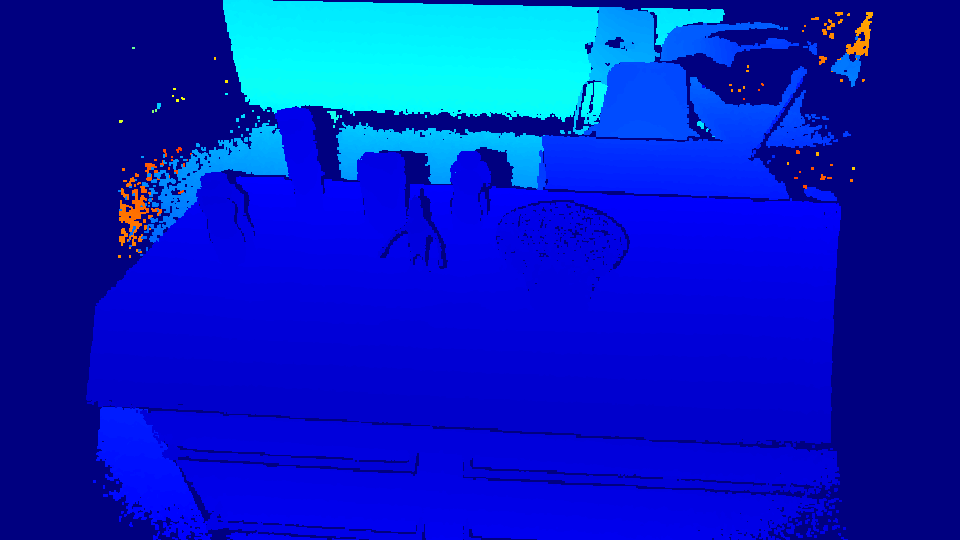
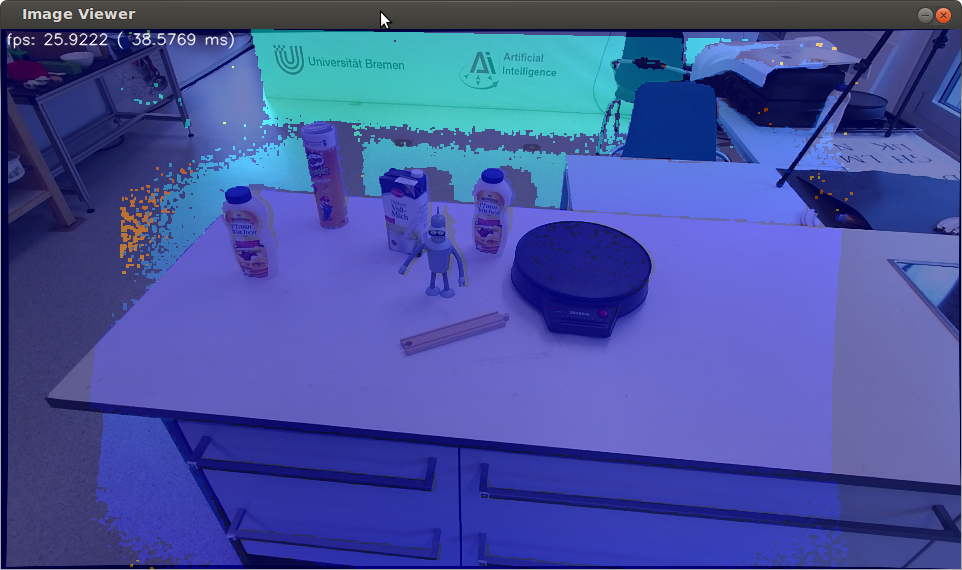
Here are some screenshots from our toolkit: