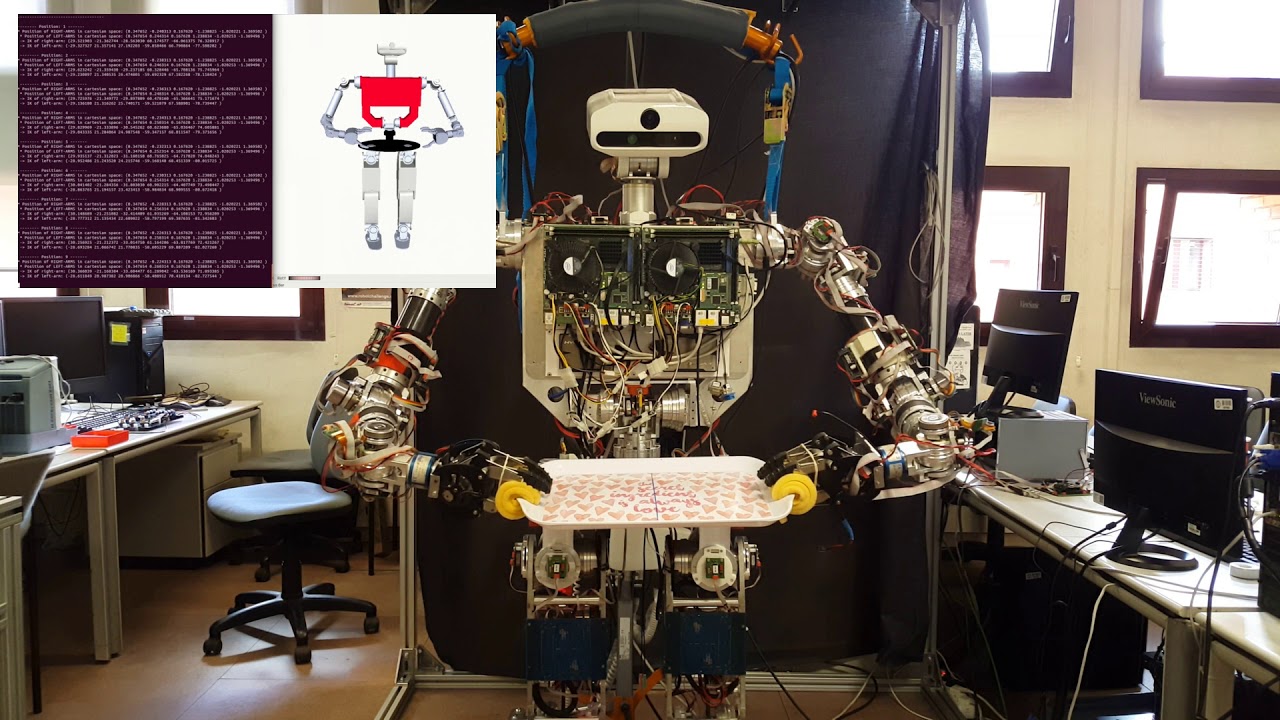
Application of Teo ballancing balls on a tray using his two arms and his force torque sensors (Press image to see a video)
- Fork the repository
- Create your feature branch (
git checkout -b my-new-feature) off themasterbranch, following the Forking Git workflow - Commit your changes
- Push to the branch (
git push origin my-new-feature) - Create a new Pull Request
![]()
