設計に関する指摘の修正 #5
設計に関する指摘の修正 #5
Conversation
|
#4 で設計の基本的な注意点を述べていますが,前提条件として 1)可搬重量 をまず議論してから他のことに取りかかったほうが良いと思います. あと,オフィスロボットに求められる要件という観点からの議論がもしあればお願いします. |
|
現状回答できるのは、1)可搬重量と4)作業領域です。 可搬重量目標とする可搬重量は1kgと設定します。設定した理由は、調査したオフィスロボット作業の中で、比較的軽量なものを把持対象としていたためです。現在の設計でこの1kgが持ち上げられるかを計算しました。 肩ピッチ軸に必要なトルクは、以下のモーメントの合計となる
肩ピッチ軸から肘ピッチ軸までのリンク長は0.275m。リンクの重量は0.22kg。リンクの重心は中心にあると仮定する(0.1375m)。
肩ピッチ軸にかかるトルク:10.249Nm
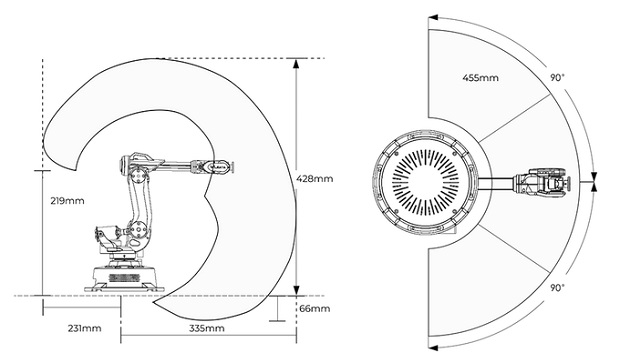
作業領域行わせる作業から、ロボットアームの作業領域を決定する。
|

|
作業領域に関して 作業領域ですが,作業する領域に対して,ロボットアームのリンクの長さや関節配置が適切かということを議論することが必要です.作業領域が小さい場合は,リンクを短くすればトルクは十分となります. 参考(あまり適切な図ではありませんが...) 軽量化できるところは残っていますので,軽量化を行ったほうが良いと思いますが,モータのトルクに関しては,どのような作業を行うかに依存するかなと思います. ただし,必要な強度と剛性が得られる場合は,安全面からも軽量化はできるだけ行ったほうが良いので,徹底して軽量化を行ったほうが良いとは思います. |
|
現在、design_241112ブランチの最新では以下の変更を加えています。
|

|
反応が遅くなりましたが,上記の変更が何を意図しての変更かが明確ではありません. |
作業内容卓上の片づけ 作業領域机の端から50cm以内の位置に対象物が置かれており、箱の高さは約30cm。下図に示す領域内での作業が行えればよい。 オフィスロボットのアームに求められるものオフィス環境で活動するロボットには、高いバックドライバビリティが求められる。バックドライバビリティとは、外力に対する関節の応答性や柔軟性を指し、具体的には人や物からの外力に対して滑らかに動作を許容する能力を意味する。この特性は、オフィス環境特有の人との近接した作業環境や、協調作業が求められる場面で特に重要である。例えば、人がロボットに意図せず外力を加えた場合、その力を強く反発することなく、自然に受け流すことができれば、怪我や物損のリスクを大幅に低減できる。 |

{kind=link}
部品強度の計算動的荷重を想定するため、疲労強度を下回るように設計する。A5052の疲労強度は降伏強度(130MPa)の0.4~0.5とされるため、部品にかかる応力は52MPa以下となるように設計をする。最終的な可搬重量は、それぞれの部品がいくつの荷重まで耐えられるかを確認し求める。Inventorの応力解析を行い、フォン ミーゼス応力の最大値が52MPaを超えない値を求める。 |
|
@KiyoshiroKawanabe |
#4 で指摘された箇所を修正したが、以下の指摘に関しては未修正である。