This repository is aimed for those who want to learn more about the Human-Robot Interaction Demo at the OpenDays at University of Birmingham. The demonstration is about a human-humanoid dance interaction with a NAO humanoid robot. In the interaction, a person in a face-to-face interaction imitates what the robot does. Essentially users mirror or imitate 10 arm upper movements with increment and decrement of its velocity.
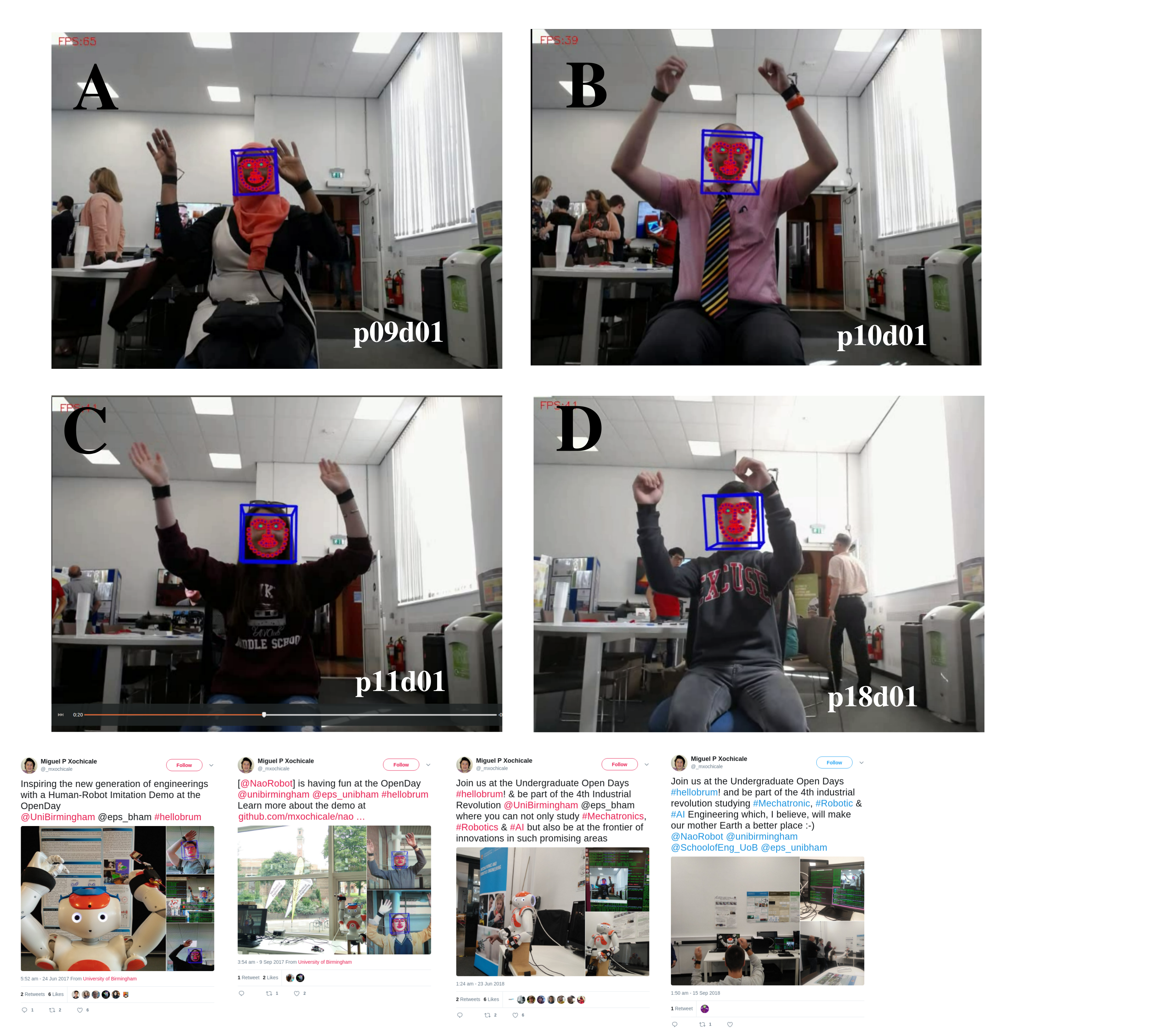
NB Video were recorded to detect head pose estimation of the participants using OpenFace framework. However, data is not available for neither publication nor analysis.
If you have any specific questions about the information of this repository, you can contact Miguel P Xochicale. If your question might be relevant to other people, please instead open an issue.