This repository is created to host the work about a microprocessor for FPGA board Xula2-LX25 that only can load code if accompanied by a proof that will be machine-checked in place. All the designs are written in MyHDL which is a HDL written in Python. Details and manual to use MyHDL can be found on http://myhdl.org/
It is based on following repositories
- https://github.com/develone/SDRAM_Controller for access to its 32MBytes of memory, resulting from udara28 Udara De Silva's work for Google Summer of Code 2015.
- https://github.com/on1arf/myhdl-vga_bounceball/blob/master/vga640x480.py for its VGA code in myhdl.
- Python 2
- MyHDL
To run the tests myhdl and SDRAM_Controller should be included in the PYTHONPATH
export PYTHONPATH = $PYTHONPATH:<path to myhdl>:<path to SDRAM_Controller>
python <path to SDRAM_Controller>/test_sdram.py
python <path to SDRAM_Controller>/test_controller.pyThis folder contains a sdram modal. It has a similar interface to real sdram which is defined in the file sd_intf.py The modal is closely simulating the sdram behaviour with the timing delays so that an sdram controller can be tested for functionality.
Simulator is simply a python dictionary wrapped with an interface similar to sdram hardware. Writing to sdram is equivalent to adding (addr,value) pair to the dictionary. This is a good example of using the power of python to write models that can verify the functionality of RTL designs.
Simulator also has some built-in checks to detect any illegal commands or sequence of commands. If such a violation has happened simulator output will have messages in the form "SDRAM : [ERROR] error-message". If such messages are present in the output, the controller is not working properly. The error message can be used to detect and correct the faults in the controller.
This simulator prints several types of messages to the console.
| Output | Description |
|---|---|
| SDRAM : [COMMAND] command-name | In every possitive edge of the clock cycle sdram will print the current command issued. (This would appear only if show_command is set to True. Default is False) |
| STATE : [CHANGE] old-state -> new-state @ time | Each bank can be in different state. This would print the state transition and the time |
| DATA : [WRITE] Addr: addr Data: value | This print happens at the moment when data is written to the memory. There is a few cycle delay between the time write command appear in the pins and the time when actual data is written to the memory |
| STATE : [READ] Data Ready @ time | This is a very important print. It appears when sdram start driving the data bus with the read value. Since the sdram will only drive the bus for a limited time the controller should extract the data right after this time |
| SDRAM : [ERROR] error-message | There are several self tests in the sdram. If this type of message appear in the output, controller is not functioning properly. error-message will give more information about the error. |
Simulator test is availiable in the file test_sdram.py . This test can be run using the following command.
python test_sdram.pyThe test uses the transactors defined in sd_intf.py file to do the read and write. It manually drives the input ports of the sdram and read the value from inout port.
The controller is written reffering the VHDL designed by xesscorp which can be found on https://github.com/xesscorp/VHDL_Lib/blob/master/SdramCntl.vhd
Sdram controller make it easy to access the sdram. The host logic can use the sdram more likely an sram because of the controller. It takes care of row refreshes and gives an easy to use interface for the host logic to access the sdram. Host side interface of the controller is availiable in the file host_intf.py
-
WRITE : To perform write operation write the address to addr and the data to data_i and drive write_i high. Hold the values until done_o goes high.
-
READ : To perform read operation write the read address to addr and wait until don_o goes high. Read the value of data_o as soon as done_o goes high.
-
MyHDL allows to write transactors in the host_intf.py file where the host side interface is defined. Transactors further simplifies usage of the controller. With transactors read and write looks like follows
yield host_intf.write(120,23)
yield host_intf.done_o.posedge
yield host_intf.read(120)
yield host_intf.done_o.posedge
print "Data Value : ",host_intf.data_oController test is availiable in the file test_controller.py. This test can be run by the following command.
python test_controller.pyThe test uses the transactors defined in host_intf.py file to do the read and write. It manually drives the input ports of the controller and read the value from the output port.
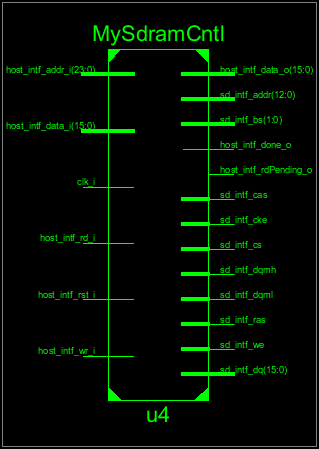
MyHDL offeres a very simple interface to perform the conversion from MyHDL to either Verilog or VHDL. The file Converion.py uses these interfaces to generate both Verilog and VHDL convertions of the SdramCntl.py. Following command will generate MySdramCntl.v, MySdramCntl.vhd and pck_myhdl_10.vhd files.
python Conversion.pypck_myhdl_10.vhd is a VHDL library file which is required by MySdramCntl.vhd (The name of the file may change depends on the MyHDL version being used.)
The converted VHDL design has been verified on Xula2 board. Detailed step followed for the hardware verification can be found at http://design4hardware.blogspot.com/2015/08/detailed-steps-for-hardware.html
The converted output (MySdramCntl.v or MySdramCntl.vhd and pck_myhdl_10.vhd) can be used in any RTL design just as a regular verilog/VHDL file. Simply add the converted files to an existing project and instantiate a MySdramCntl module.
Sdram can be programmed to used in several different modes. However this controller does not allow to set up the sdram user mode. Instead it uses a fixed mode where burst length is one.
- bought the Xula2 with VGA output
- Fork from github for SDRAM access, then manually merge with another github project for VGA
- changed the name
- test it on Xula2
- test the VGA VHDL code http://www.pyroelectro.com/tutorials/fpga_vga_resistor_dac/ on Xula2
- modify the VGA myhdl part so that its VHDL output is as previous point
- fetch for a rbtree or similar that can be parcouru while being modified.
- start programming the output so that it shows characters in the rbtree
- modify the core to read from primary partition of the SDCARD
- start coding the ROM in the SDCARD
- find way to connect a keyboard or a touchscreen or transparent keyboard over a screen
- make myhdl code for the touchscreen/keyboard
- write proof for program that measures time between two keypresses, and escape at ESC key.
- write an editor and its proof
- Find a better name. CheckProofOnLoad would be more accurate, if load is understood for executables only.
- reproducibility: see if this code can be run on amazon fpga, as is, or at least with as few changes as possible
- network: add a serializer/deserializer (serdes) myhdl library, may it do hdmi or not, may it standard or not, then add ability to read code and proof from a serdes channel.