

https://github.com/arksine/moonraker
By default, the primary UART is assigned to the Linux console. If you wish to use the primary UART for other purposes, you must reconfigure Raspberry Pi OS. This can be done by using raspi-config:
- Start raspi-config:
sudo raspi-config. - Select option 3 - Interface Options.
- Select option P6 - Serial Port.
- At the prompt Would you like a login shell to be accessible over serial? answer 'No'
- At the prompt Would you like the serial port hardware to be enabled? answer 'Yes'
- Exit raspi-config and reboot the Pi for changes to take effect.
For full instructions on how to use Device Tree overlays see this page.
In brief, add a line to the /boot/config.txt file to apply a Device Tree overlay.
dtoverlay=disable-bt
Check your /etc/systemd/system/klipper.service file for API enable parameter -a /tmp/klippy_uds:
ExecStart=/home/pi/klippy-env/bin/python /home/pi/klipper/klippy/klippy.py /home/pi/klipper_config/printer.cfg -l /home/pi/klipper_logs/klippy.log -a /tmp/klippy_uds
Thanks to wolfstlkr
sudo apt-get install python3-pip python3-gpiozero python3-serial git
sudo pip3 install multitimer
git clone https://github.com/bustedlogic/DWIN_T5UIC1_LCD.git
- Display <-> Raspberry Pi GPIO BCM
- 1 - Nc
- 2 - Nc
- 3 - Rx = 8 - GPIO14 (Tx)
- 4 - Tx = 10 - GPIO15 (Rx)
- 5 - Ent = 33 - GPIO13
- 6 - BEEP = 31 - GPIO6 (Optional)
- 7 - A = 35 - GPIO19
- 8 - B = 37 - GPIO26
- 9 - Vcc = 4 - (5v)
- 10 - Gnd = 6 - (GND)
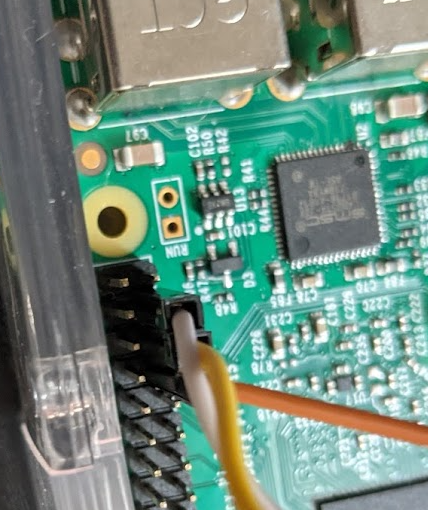
Here's a diagram based on my color selection:
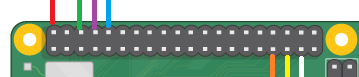

I tried to take some images to help out with this: You don't have to use the color of wiring that I used:



Enter the downloaded DWIN_T5UIC1_LCD folder. Make new file run.py and copy/paste in the following (pick one)
For an Ender3v2
#!/usr/bin/env python3
from dwinlcd import DWIN_LCD
encoder_Pins = (26, 19)
button_Pin = 13
LCD_COM_Port = '/dev/ttyAMA0'
API_Key = 'XXXXXX'
DWINLCD = DWIN_LCD(
LCD_COM_Port,
encoder_Pins,
button_Pin,
API_Key
)If your control wheel is reversed (Voxelab Aquila) use this instead.
#!/usr/bin/env python3
from dwinlcd import DWIN_LCD
encoder_Pins = (19, 26)
button_Pin = 13
LCD_COM_Port = '/dev/ttyAMA0'
API_Key = 'XXXXXX'
DWINLCD = DWIN_LCD(
LCD_COM_Port,
encoder_Pins,
button_Pin,
API_Key
)Run with python3 ./run.py
Note: Delay of 30s after boot to allow webservices to settal.
path of `run.py` is expected to be `/home/pi/DWIN_T5UIC1_LCD/run.py`
sudo chmod +x run.py
sudo chmod +x simpleLCD.service
sudo mv simpleLCD.service /lib/systemd/system/simpleLCD.service
sudo chmod 644 /lib/systemd/system/simpleLCD.service
sudo systemctl daemon-reload
sudo systemctl enable simpleLCD.service
sudo reboot
* Save / Loding Preheat setting, hardcode on start can be changed in menu but will not retane on restart.
* The Control: Motion Menu