为原来的PCAT增加了如下功能,已经提交PR:
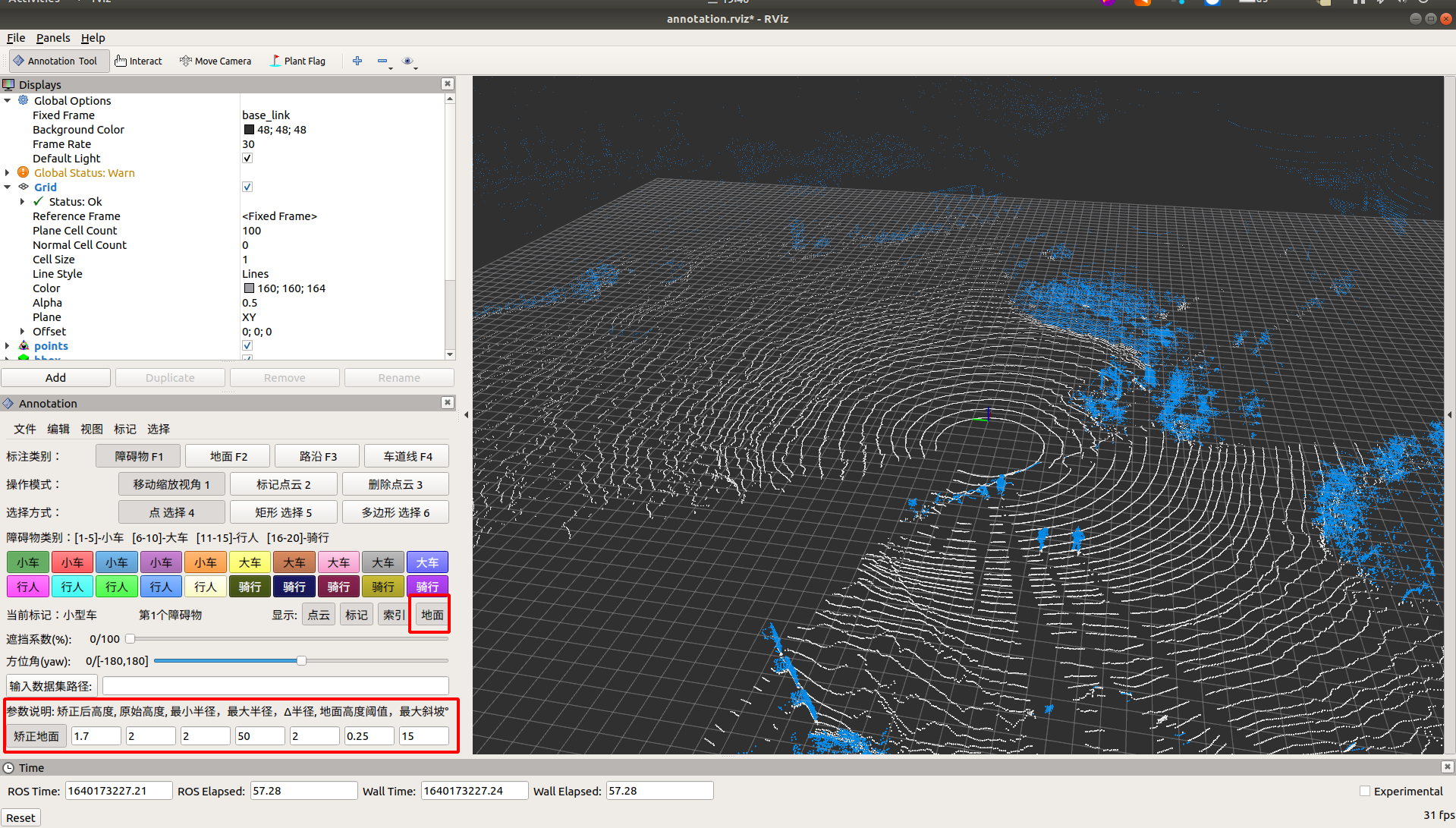
- 矫正地面按钮: 点击后(清空当前标注)并重新初始化, 同时检测地面出.根据检测出的地面拟合平面.根据拟合平面矫正点云使得地平面水平, 同时平移点云使得地面中心保持在地面一定高度上(对3D检测保持z轴高度非常重要). 当按钮激活期间, 后续的其他帧点云会自动在加载时就完成矫正.
- 参数设置栏目: 当矫正按钮激活时, 在输入栏回车可以更新参数并(清空当前标注)重新初始化本次点云然后检测地面.
- 显示栏:增加地面显示按钮.当矫正地面和显示点云功能激活时显示地面点云.
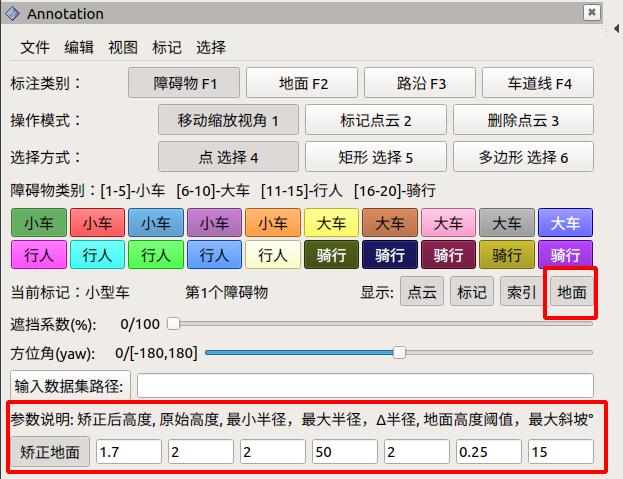
效果如图,保持点云水平并距离地面1.7m(KITTI). 下图为显示地面状态.
-
Demo项目,请自行魔改
-
This is the open source version:
Author: WenwenDuTEL: 18355180339E-mail: [email protected] -
Video tutorial:
-
https://v.youku.com/v_show/id_XNDYxNjY4MDExMg==.html?spm=a2h0k.11417342.soresults.dtitle -
https://v.youku.com/v_show/id_XNDYxNjY4MDI5Mg==.html?spm=a2hzp.8244740.0.0
配置要求:ubuntu16.04 + ROS Kinetic full注意:请务必保证系统使用原生python2.7,在使用Anaconda2的情况下,请在~/.bashrc环境变量中临时关闭Anaconda2,避免冲突。(如果你长期使用ROS,强烈建议在虚拟环境下使用anaconda,避免冲突。)
参考ROS WiKi-安装说明, 安装步骤如下:
添加ROS源:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
添加ROS源秘钥:
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
更新源
sudo apt-get update
安装ROS完整版:(由于使用Rviz,PCL等模块,请务必安装完整版)
sudo apt-get install ros-kinetic-desktop-full
sudo apt-cache search ros-kinetic
初始化ROS:
sudo rosdep init
rosdep update
添加环境变量
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
更新ROS环境变量
source /opt/ros/kinetic/setup.bash
测试ROS是否成功安装:
开启一个新的Teminnal,输入:
roscore
测试Rviz
开启一个新的Teminnal,输入:
rviz
成功显示rviz界面如下:

(1) 进入文件夹PCAT
(2) 开启终端,运行安装命令: sh install.sh
(3) 显示 install successful 后,home文件夹下出现lidar_annotation文件夹,安装成功
- 导入待标注点云pcd文件
Copy 待标注的点云.pcd格式文件到 lidar_annotation/pcd/ 文件夹下
注意:标注工具默认支持激光雷达pcd格式点云,Field为[x,y,z,intensity],如果使用XYZRGB等其他pcd format,请在src/rviz_cloud_annotation/launch/annotation.launch中更改pcd_type参数的value.
常见issue
[1] 如何支持其他类型pcd或其他3Dpoints? 修改以下code...
// src/rviz_cloud_annotation/src/rviz_cloud_annotation_class.cpp
void RVizCloudAnnotation::LoadCloud(const std::string &filename,
const std::string &normal_source,
PointXYZRGBNormalCloud &cloud);
- 开始标注
打开 Teminnal, 运行: sh run.sh
显示标注界面如下:

首次使用请务必仔细阅读
下面就上图中 A, B, C, D, E 5个模块做详细说明:
- A. 标注菜单栏
标注菜单栏由 [文件], [编辑],[视图],[标记],[选择] 5部分组成
文件:(1)切换新文件,(2)清除当前帧标记,(3)保存
编辑:(1)取消,(2)恢复
视图:(1)增加点的尺寸,(2)减小点的尺寸,(3)重置点的尺寸
标记:(1)清除当前物体的标记,(2)切换颜色,(3)设置障碍物BBox遮挡系数,(4)调节障碍物BBox方位,(5)调节障碍物BBox尺寸
选择:(1)跳转至下一物体,(2)跳转至上一物体
特别说明:
1.切换新文件会自动保存当前文件的标注信息
2.取消/恢复开销较大,尽量避免使用
3.标记完成一个物体后,需要切换到下一个物体进行标注,否则会覆盖当前标记;选择新的颜色会自动切换到下一物体;物体ID显示在面板上
4.标记障碍物时,颜色 1~5,6~10,11~15,16~20 分别对应标签: 小车,大车,行人,骑行;
5.标记障碍物时,需要设置方位角和遮挡系数,请以实际为准标注,0--不遮挡,1--完全遮挡
尽量使用简洁的方式完成标注,熟练使用快捷键可以有效提高标注速度。
 特别说明
1.点云被重复标记为 障碍物,路沿,车道线,地面时,标签优先级为 (障碍物 > 路沿/车道线 > 地面)
特别说明
1.点云被重复标记为 障碍物,路沿,车道线,地面时,标签优先级为 (障碍物 > 路沿/车道线 > 地面)
在看标注说明之前请务必观看视频教程
- 标注请按照: 【障碍物--> 路沿-->车道线-->地面】 的顺序。
(1) 障碍物
障碍物包括 小车(轿车),大车(卡车、有轨电车等),行人,骑行(电动车)4类。
在该数据集中主要包含 小车和行人,及少量的大车和骑行。请在标注`颜色面板`选择不同的按钮,对应不同的障碍物。
颜色面板分为4大块,颜色 1~5,6~10,11~15,16~20 分别对应: 小车,大车,行人,骑行,代表不同的障碍物。
对每一帧的点云,障碍物存在则标注,不存在则不标注;每标注完一个障碍物,需要==切换至下一个障碍物进行新的标注。
(比如:标完第一辆小车,需要按`Shitf+N` 切换至下一小车,或者按`Shift+P`切换至上一障碍物进行修改)。
选择新的颜色会自动切换至新的下一障碍物。
每个障碍物,需要标注人员自己判断大致的朝向,并进行方位调节(R、F键)。
受到遮挡的障碍物请设置`遮挡系数`,默认为 0,即不遮挡,大多数障碍物不存在遮挡。

(2) 路沿
路沿指道路中地面的边界,如上图显示;标记路沿只能使用点选的方式标注(具体操作可以参考标注视频教程)
一般一帧点云中有多条路沿,每标记一条,需要切换至下一路沿进行标注,切换方式与障碍物切换相同。
(3) 车道线
车道线指道路中颜色明显突出的线段,一般出现的频率比较低,没有出现或者看不清楚则不用标注;车道线的标注方式与路沿完全相同。
(4) 地面
地面是一帧点云中比较关键的部分,一般选择使用多边形进行选择标注,边界为之前标注的路沿。
地面可以分多次标注,拼接生成;如果一次选点过多,地面生成时间会较长。
*在2.4.0版本之后,标注工具增加了地面辅助标记功能:用户每次选择`地面(F2)`按钮时,系统会自动生成95%的地面,用户在此基础上进行细节修改,
得到最终的地面标注。


1. 标注工具使用过程中如果遇见问题,或者代码部分有疑问,编辑需要,联系 @杜文文(18355180339 / [email protected])
2. 视频教程:
A`https://v.youku.com/v_show/id_XNDYxNjY4MDExMg==.html?spm=a2h0k.11417342.soresults.dtitle`
B`https://v.youku.com/v_show/id_XNDYxNjY4MDI5Mg==.html?spm=a2hzp.8244740.0.0`
- 软件版权 本标注工具的版权归WenwenDu所有
- 其他版权
本标注工具在 RIMLab 开源标注工具 rviz_cloud_annotation 上改进完成:
https://github.com/RMonica/rviz_cloud_annotation
原始版权说明:
Original Copyright:
/*
* Copyright (c) 2016-2017, Riccardo Monica
* RIMLab, Department of Engineering and Architecture
* University of Parma, Italy
* http://www.rimlab.ce.unipr.it/
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions are met:
*
* 1. Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
*
* 2. Redistributions in binary form must reproduce the above copyright notice,
* this list of conditions and the following disclaimer in the documentation
* and/or other materials provided with the distribution.
*
* 3. Neither the name of the copyright holder nor the names of its
* contributors may be used to endorse or promote products derived from this
* software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
* ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE
* LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
* CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
* SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
* INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
* CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
* ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
*/