Swapping out the Oberon7 arm with another manipulator
The default arm loaded in dave_demo.launch is the Oberon7 arm. This tutorial details how to swap out that arm and put a different arm (the Predator arm is shown in this tutorial) on the RexROV robot base.
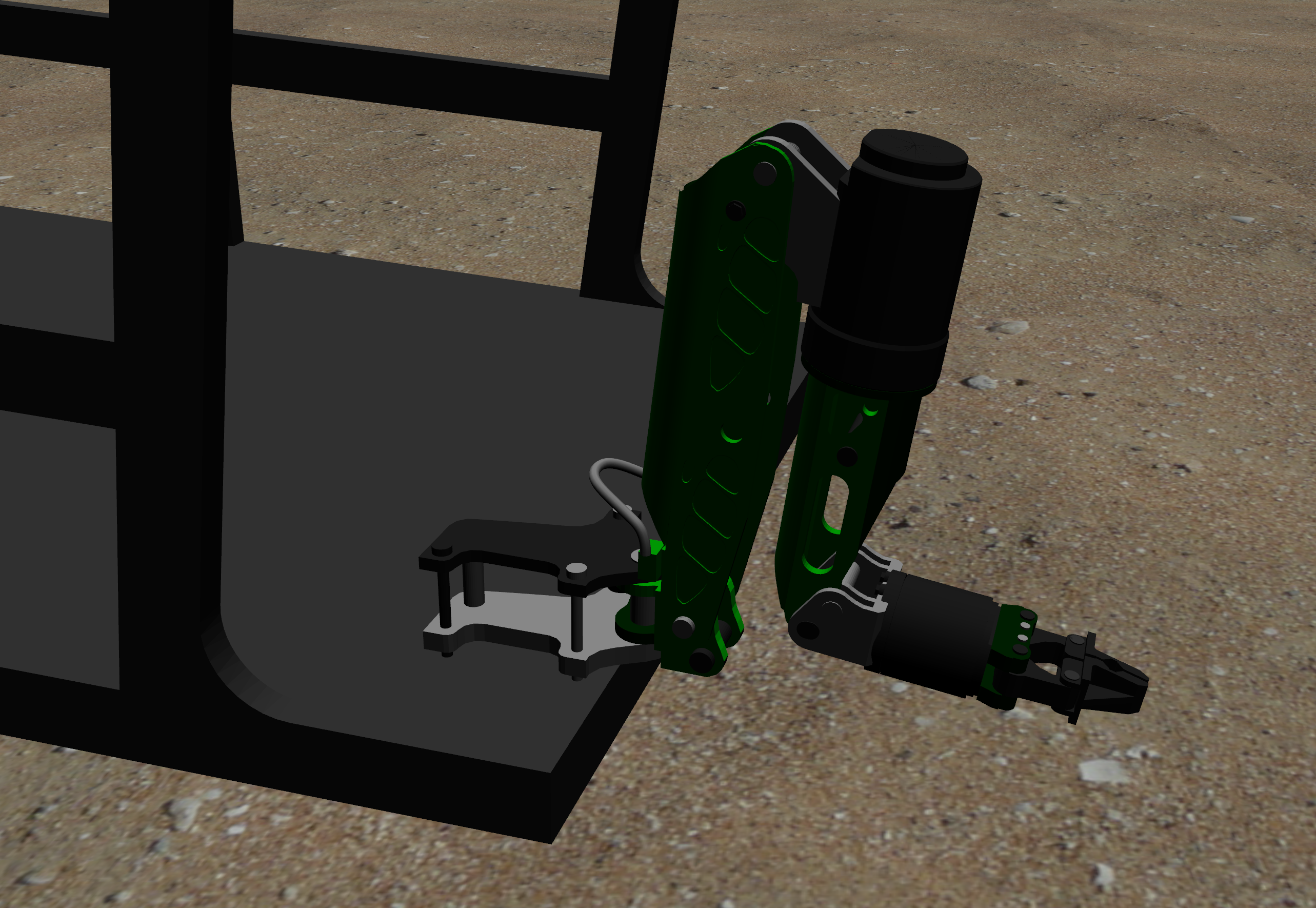
To see the final result, that is, the predator arm swapped for the oberon7 arm, you can run this command:
roslaunch dave_robot_launch rexrov_predator.launch
You should see the following arm:

The folks from UUV Simulator made two manipulators, the Oberon7 and the Oberon4 manipulators. The Oberon7 is inspired by the Schilling Robotics Orion 7P.
Before you start this tutorial, it is best that you have a xacro file with the joints and links of the manipulator you want to integrate with the UUV.
To see the original arm before the swap, run the following command, which launches several other launch files and loads many xacros.
roslaunch dave_demo_launch dave_demo.launch
The figure below shows the different launch and xacro files that pertains to the manipulator functionality.
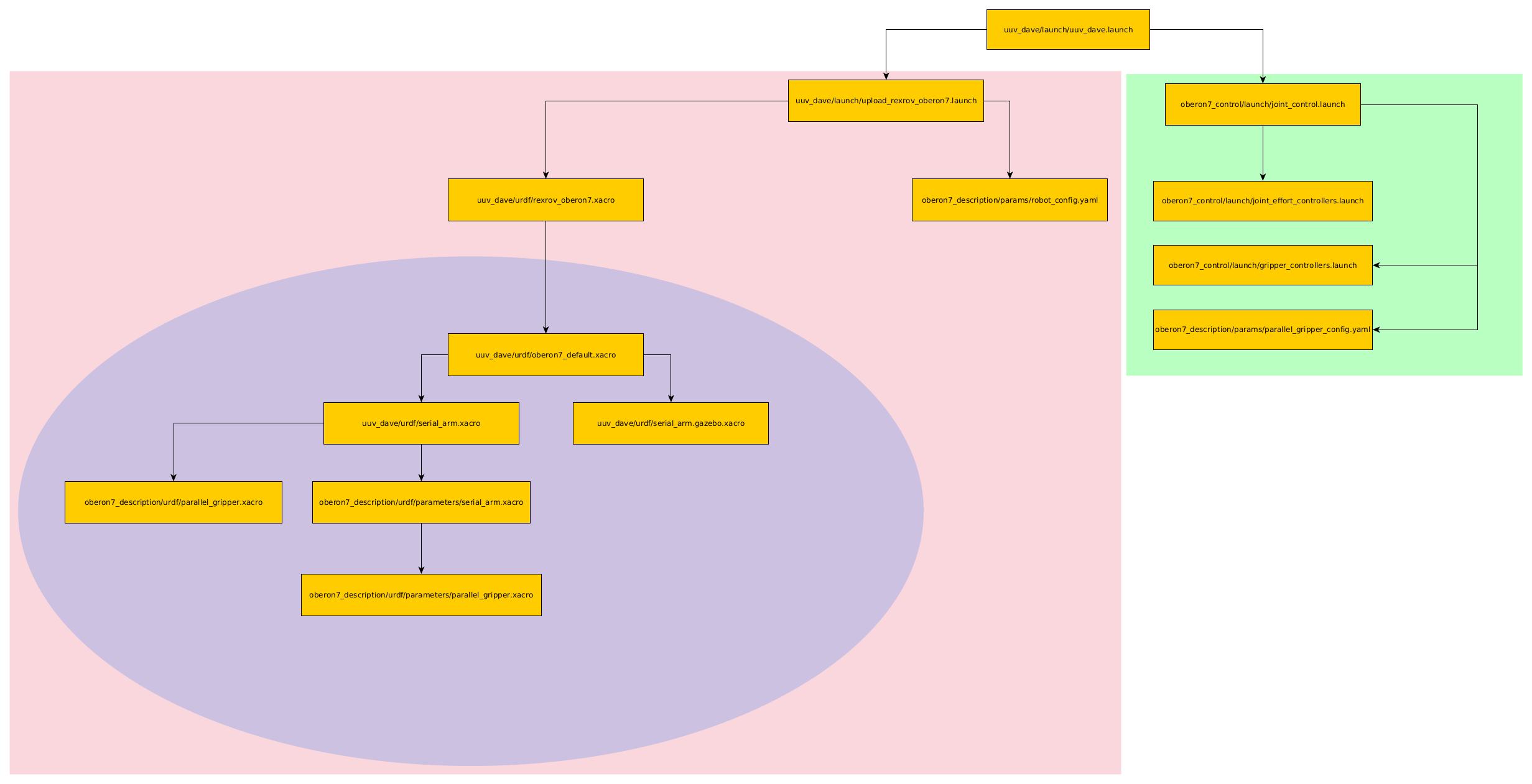
Following is a list of what each of those files do:
-
dave_demo.launch: The main launch file that is called in the terminal.
- Launches the ocean world
- Launches the
upload_rexrov_predator.launch - Launches
joy_accel.launchwhich is launches a node that enables controlling the acceleration of the UUV. - Launches the
joint_control.launchwhich launches a node that enables controlling the manipulator using the joystick.
-
upload_rexrov_oberon7.launch:
- Loads the xacro chain that defines the robot by calling the root xacro (rexrov_oberon7.xacro).
- Spawns the robot defined by the xacro
- Loads the params in
robot_config.yamlinto rosparam.
- rexrov_oberon7.xacro: Root of the xacro chain that defines the rexrov and the oberon7.
- robot_config.yaml: A file that contains parameters that are loaded into rosparam. These params include the names of the joints and the initial angles of these joints.
- obeorn7_default.xacro: Root of the xacro chain that defines the oberon7. It includes both the gazebo (TODO)
-
serial_arm.xacro: Defines the macro
oberon7_serial_armthat defines the links and joints of the oberon7 arm. - serial_arm.gazebo.xacro: Contains the gazebo elements of the links and joints defined in the serial_arm.xacro.
-
parameters/serial_arm.xacro: Contains link parameters that are used in the
serial_arm.xacrofile. - parallel_gripper.xacro: Contains the gripper links and joints.
-
parameters/parallel_gripper: Contains link parameters that are used in the
parallel_gripper.xacrofile. -
joint_control.launch:
- Launches the
joint_position_controller.pynode that subscribes to the joy commands and send control commands to the arm after passing them through a PID. - Launches
joint_effort_controllers.launch - Launches
gripper_controllers.launch
- Launches the
-
joint_effort_controllers.launch:
- Launches the control manager node for the serial arm.
- Defines and loads joint effort controller's PID values into rosparam.
-
gripper_controllers.launch
- Launches
gripper_controller.pywhich is analogous to thejoint_position_controller.pypreviously mentioned but for the grippers.
- Launches
- parallel_gripper_config.yaml
To swap out the oberon7 arm with something else, some of these files need to be edited or changed as follows (for these examples I will be using swapping the oberon7 arm with a predator arm as an example):
Note: By convention, your xacro file that defines the manipulator should be placed in a ROS package called
<arm_name>_description. Also, please note that, in the case of the oberon7 arm, the oberon7 root xacro file is theoberon7_default.xacro. There is a hierarchy of xacro files to increase modularity and improve clarity, but you can chose to not rely on macros and have less xacro files. Essentially the entire xacro chain (in the blue colour) can be reduced to only one xacro file.
- Make a copy of the
uuv_dave/urdf/rexrov_oberon7.xacrofile and call itrexrov_<arm_name>.xacro. In that file you will see the following lines.
<xacro:include filename="$(find uuv_dave)/urdf/oberon7_default.xacro" />
and line
<xacro:oberon7 namespace="oberon7" parent="$(arg namespace)/base_link">
<origin xyz="1.3 -0.5 -0.615" rpy="0 0 0"/>
</xacro:oberon7>
The first one includes the xacro file that file that defines the macro of the manipulator. The second set of lines call that macro. So in your case you should edit these lines to include the xacro file that defines a macro for your own robot, then call on your own macro.
In case of the predator arm, it looks something like this.
<xacro:include filename="$(find uuv_dave)/urdf/predator_default.xacro" />
and
<xacro:predator namespace="predator" parent="$(arg namespace)/base_link">
<origin xyz="1.3 -0.5 -0.615" rpy="0 0 0"/>
</xacro:predator>
Make sure that the joints in your xacro have transmissions so the controller is able to control them. Additionally, if you want to have force-torque sensors at the joints, make sure to have the ft_sensor plugin.
You can chose to have the same hierarchy as the one that already exists, but it's not necessary.
Your arm is likely to have different joint names than the oberon7 arm. Yours may not even be a 7 DOF arm. So you will likely need to configure the joy launch files (the ones shaded green in the diagram above).
- In the
joint_control.launchfile, make sure the edit the section under thejoint_position_controller.pynode initiation to accurately reflect the joint names of your manipulator arm. - For the
joint_effort_controllers.launch, make sure to also edit the joint names to accuracy represent the joint names in your own robot. - There are a couple of yaml files that you need to edit too, such as
robot_config.yaml.
Please note that these files should be located in a new package named <arm_name>_control (by convention). In this case, I made a new package called predator_control and copied and pasted things from oberon7 control into that new package.
After you have edited both components, the joystick joint control and the xacro files defining the arm. It's time to bring it all together. Duplicate the dave_demo.launch file and edit it to include your launch files that refer to your xacro files and the joy joint_control.launch that pertains to your manipulator arm.