This application marks lanes on dashcam videos and calculates the position of the car/curvature of the lane
Python OpenCV Library
-
Compute the camera calibration matrix and distortion coefficients given a set of chessboard images shot by the camera.
-
Apply a distortion correction to raw images (straight the curved lines).

-
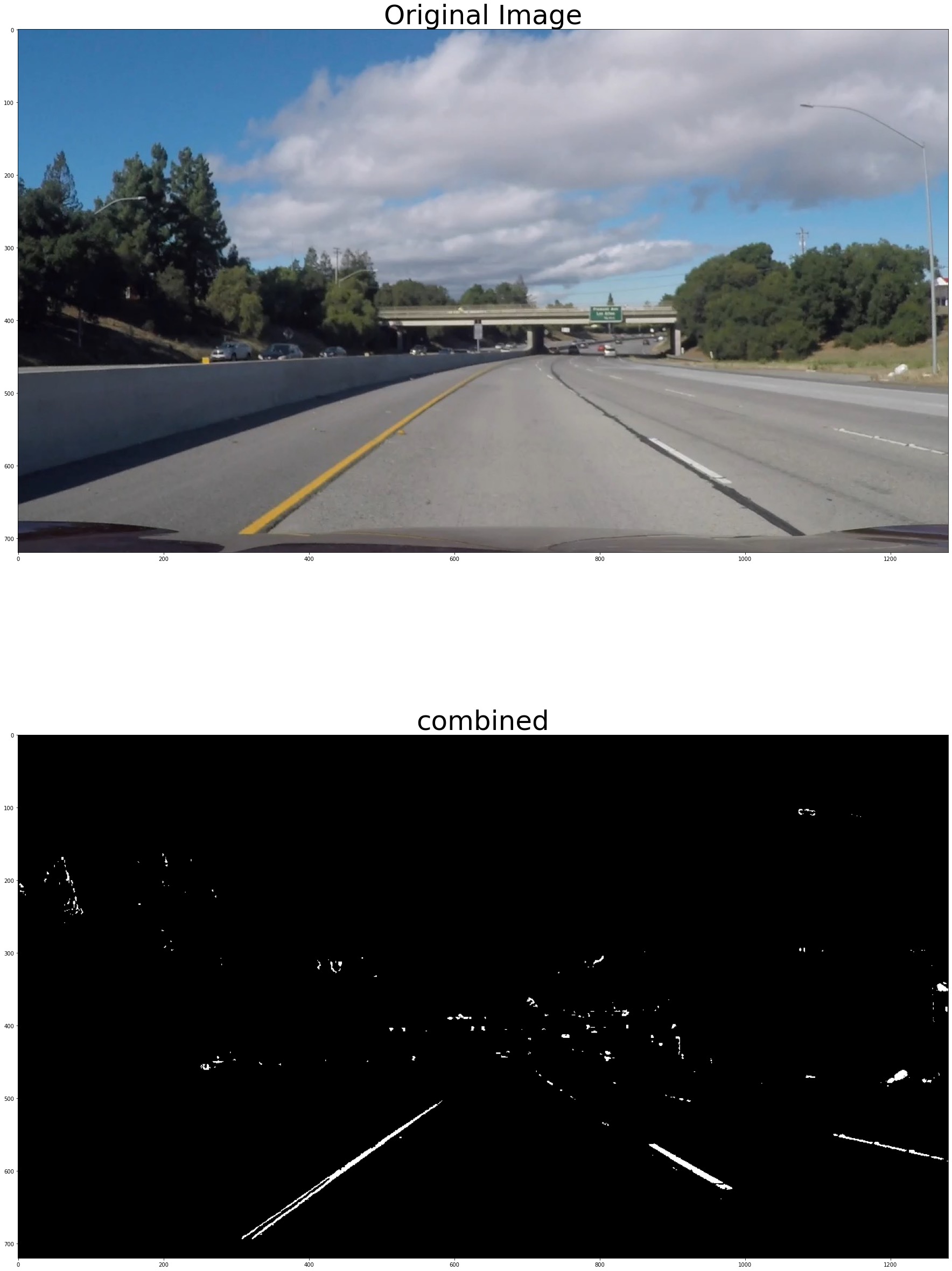
Use color transforms, gradients, etc., to create a thresholded binary image.

-
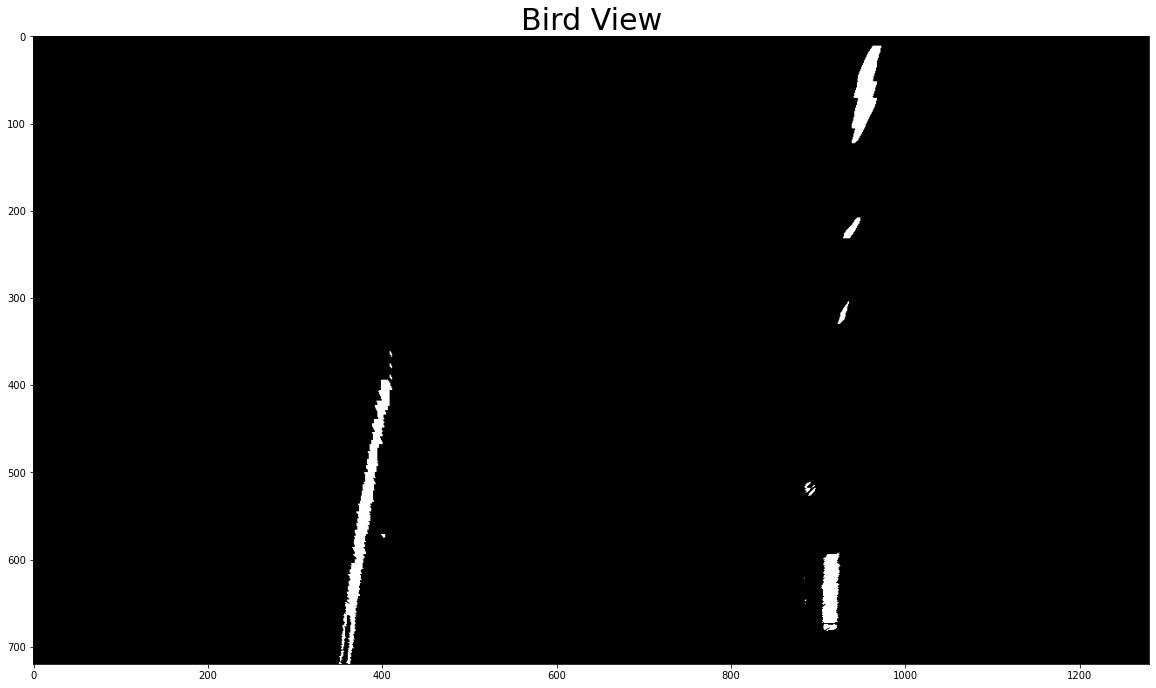
Apply a perspective transform to rectify binary image ("birds-eye view").

-
Detect lane pixels and fit to find the lane boundary.

-
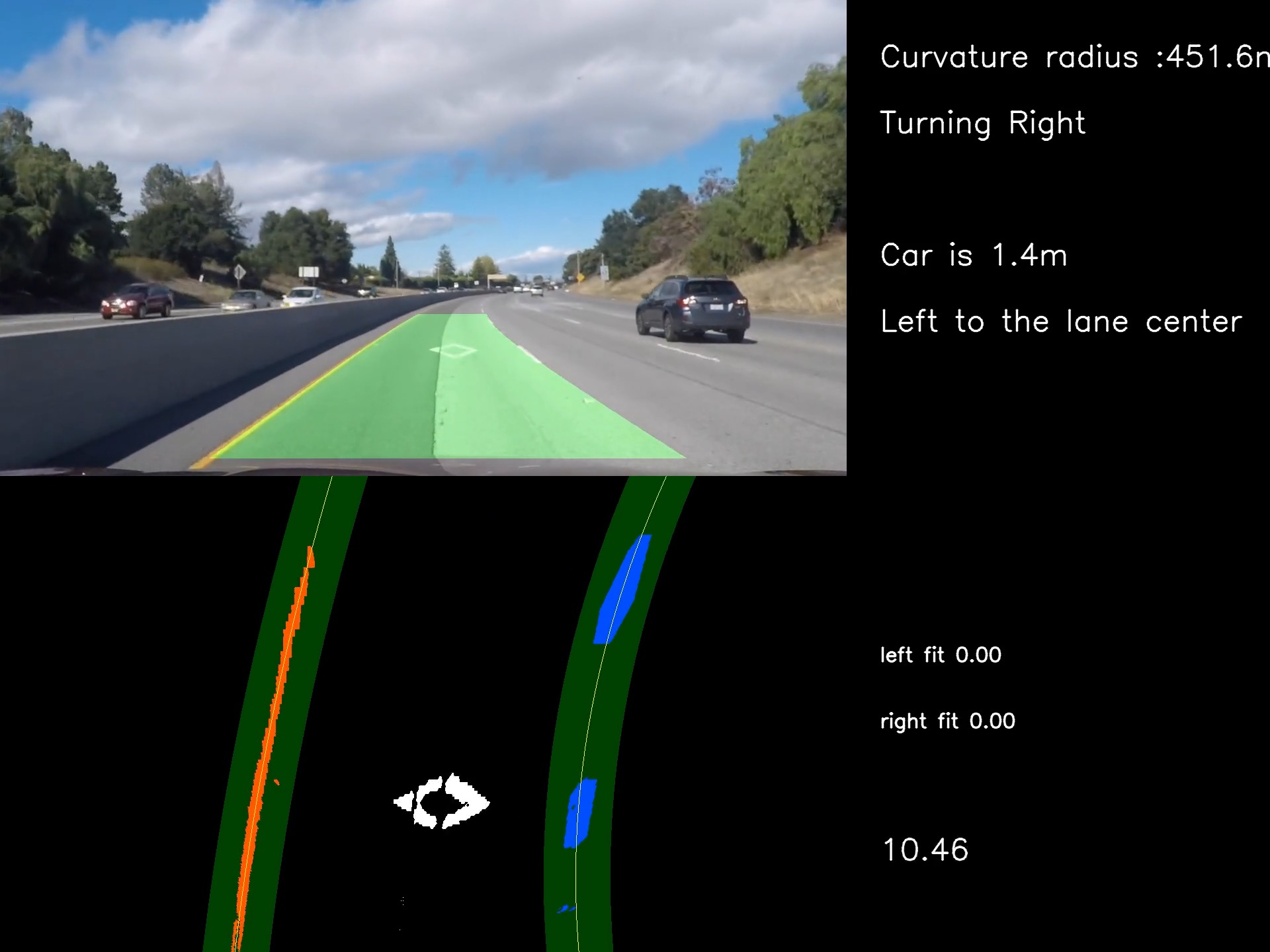
Determine the curvature of the lane and vehicle position with respect to center.
-
Warp the detected lane boundaries back onto the original image.

-
Output visual display of the lane boundaries and numerical estimation of lane curvature and vehicle position.