Turtlebot sim not moving: [map] does not exist #74
Comments
3 tasks
|
If you don't have a localization algorithm running the connectivity to the
|

|
That's fine but it still can't drive. I've tried teleop and some of the
standard autonomy packages with no luck. Again I had no issues on Indigo,
not that I think Kinetic is necessarily the problem.
…On Mon, Jan 28, 2019, 21:33 Tully Foote ***@***.*** wrote:
If you don't have a localization algorithm running the connectivity to the
map frame is not expected. If you change the "Fixed Frame" in the rviz
global options to something like base_link or base_footprint
[image: image]
<https://user-images.githubusercontent.com/447804/51880172-1c7c8800-232b-11e9-8909-de4a0047c20e.png>
—
You are receiving this because you authored the thread.
Reply to this email directly, view it on GitHub
<#74 (comment)>,
or mute the thread
<https://github.com/notifications/unsubscribe-auth/AC45_usSnT1wTdtQFbcnEE9UpHD3-FOwks5vH7LvgaJpZM4aUOVA>
.
|
|
I tried to reproduce this but it seems to teleoperate fine. Here's what I did. https://gist.github.com/tfoote/432813cd6f654b7ac6504a65fd5f27c4 From this clean install there's likely things different about your environment that you will need to determine. |
|
@tfoote Fantastic, thank you! I'll purge everything ROS related and give this a go. |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
I'm trying to drive the turtlebot in Gazebo. I've done this quite a few times, but now isn't working for some reason. I've done it before on Indigo, but struggling on Kinetic.
My installation procedure:
Now I try to run gazebo
roslaunch turtlebot_gazebo turtlebot_world.launchroslaunch turtlebot_teleop keyboard_teleop.launchNow I send teleop commands but see no movement. So I check the topics and see if there is any movement:
/turtlebot_node/cmd_velis responding to my teleop commands, the x velocity smoothly accelerates from 0.0 to 0.2 as expected./cmd_vel_mux/input/teleopdoes the same. With both of these I believe that turtlebot should now be moving.Here's my rqt_graph

Here's my frames
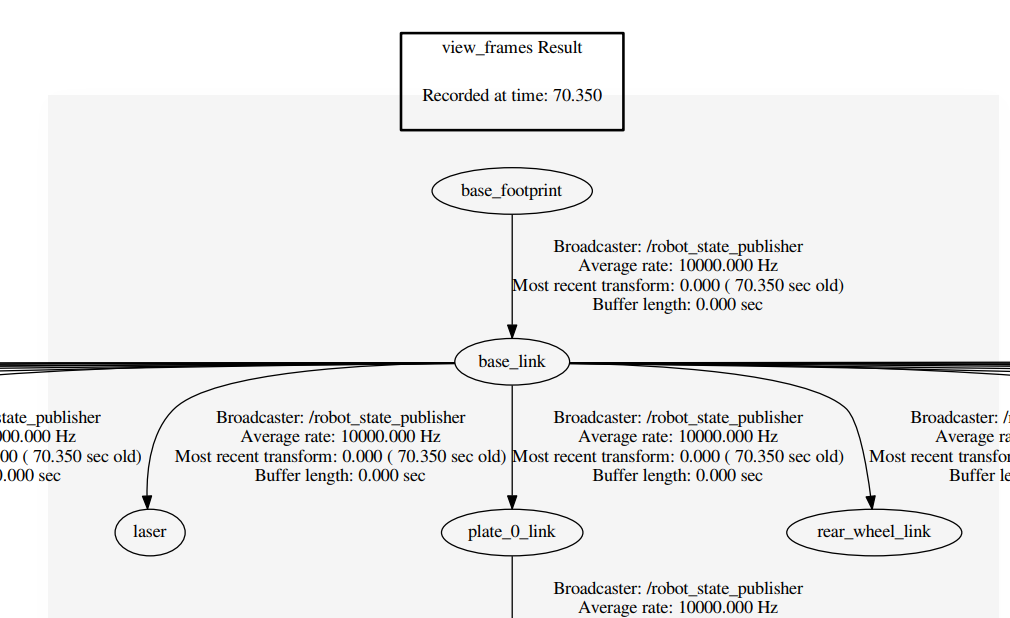
Notice that there is no /map frame.
When I open rviz I see
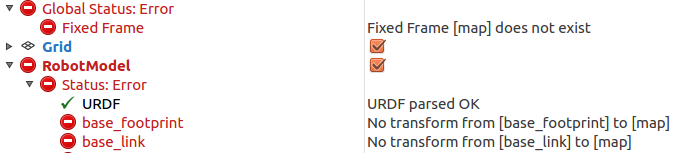
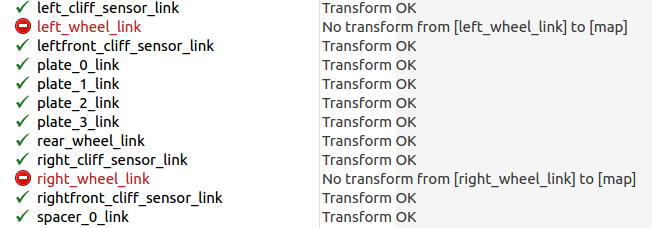
and this continues for every frame. So I add a static transform to try to fix this.
rosrun tf static_tf_publisher 0 0 0 0 0 0 map base_footprint 100Now that error goes away but there's weirdness. The wheels still don't have the correct transformation?
So that's essentially where I am. The tfs aren't working by default. I've tried uninstalling, reinstalling, using different installation instructions on fresh partitions but I keep running into this unmoving turtlebot. Any help would be appreciated.
The text was updated successfully, but these errors were encountered: