CC3D board pin mapping #73
Comments
|
Been pointed here from face book. |
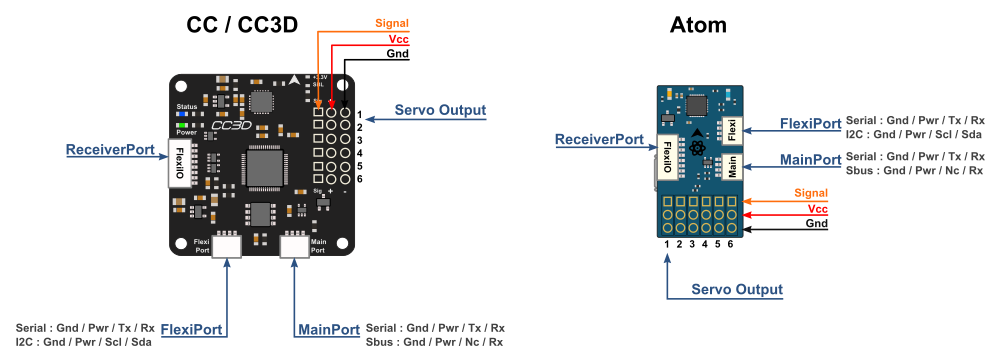
i2c for magnetometer and display: pin 3 and 4 of the flex port (tested and working) Small update after some research / guessing (still to be tested.. now I'm working with bluepill) GPS I think should be connected to the receiver port (8 pin RC_Input) While Bluetooth normally shares the same serial port of FTDI so it should be on main port: |
|
I'm also trying to reuse old CC3D for tracker. Just try to summarize all info here:
instead I'm using ST Flash loader and Arduino Nano as programmer.
Main Port Flex Port RX port MOTORS port
and than set GPS: sometimes it not accept for a first time, so you need to try more times |

{kind=link}
|
Thank you I was struggling to connect GPS and Rssi |
Hi,
i'm trying to use an cc3d board for u360gts,
but i have a lot of problems because there are no CC3D pinout map.
I've found:
pwm3 = tilt
pwm4 = pan
but i need :
TX-RX for bluethoot
i2c for magometro and display
2 pins for the buttons
TX-RX for gps
This are the info of the board that i've found
Pinouts
The 8 pin RC_Input connector has the following pinouts when used in RX_PPM/RX_SERIAL mode
Pin Function Notes
1 Ground
2 +5V
3 PPM Input Enable feature RX_PPM
4 SoftSerial1 TX / Sonar trigger
5 SoftSerial1 RX / Sonar Echo
6 Current Enable feature CURRENT_METER. Connect to the output of a current sensor, 0v-3.3v input
7 Battery Voltage sensor Enable feature VBAT. Connect to main battery using a voltage divider, 0v-3.3v input
8 RSSI Enable feature RSSI_ADC. Connect to the output of a PWM-RSSI conditioner, 0v-3.3v input
The 6 pin RC_Output connector has the following pinouts when used in RX_PPM/RX_SERIAL mode
Pin Function Notes
1 MOTOR 1
2 MOTOR 2
3 MOTOR 3
4 MOTOR 4
5 LED Strip
6 Unused
The 8 pin RC_Input connector has the following pinouts when used in RX_PARALLEL_PWM mode
Pin Function Notes
1 Ground
2 +5V
3 Unused
4 CH1
5 CH2
6 CH3
7 CH4/Battery Voltage sensor CH4 if battery voltage sensor is disabled
8 CH5/CH4 CH4 if battery voltage monitor is enabled
The 6 pin RC_Output connector has the following pinouts when used in RX_PARALLEL_PWM mode
Pin Function Notes
1 MOTOR 1
2 MOTOR 2
3 MOTOR 3
4 MOTOR 4
5 Unused
6 Unused
Serial Ports
Value Identifier Board Markings Notes
1 VCP USB PORT
2 USART1 MAIN PORT Connected to an MCU controllable inverter
3 USART3 FLEX PORT
4 SoftSerial RC connector Pins 4 and 5 (Tx and Rx respectively)
The SoftSerial port is not available when RX_PARALLEL_PWM is used. The transmission data rate is limited to 19200 baud.
To connect the GUI to the flight controller you just need a USB cable to use the Virtual Com Port (VCP) or you can use UART1 (Main Port).
CLI access is only available via the VCP by default.
Main Port
The main port has MSP support enabled on it by default.
The main port is connected to an inverter which is automatically enabled as required. For example, if the main port is used for SBus Serial RX then an external inverter is not required.
Flex Port
The flex port will be enabled in I2C mode unless USART3 is used. You can connect external I2C sensors and displays to this port.
You cannot use USART3 and I2C at the same time.
Flex port pinout
Pin Signal Notes
1 GND
2 VCC unregulated
3 I2C SCL / UART3 TX 3.3v level
4 I2C SDA / UART3 RX 3.3v level (5v tolerant
The text was updated successfully, but these errors were encountered: