| description |
|---|
Sample data from a BLDC motor controller and apply machine learning to receive predictive maintenance alerts. |
Created By: Avi Brown
Public Project Link: https://studio.edgeimpulse.com/public/102584/latest


Brushless DC (BLDC) motors' high performance and efficiency have made them one of the most popular options for industrial / robotics applications. In order to drive BLDC motors a dedicated motor controller is needed, and there exist many controller manufacturers like ODrive and Roboteq, to name a couple.
In addition to offering precise motor control, these controllers often expose a number of performance properties to the engineer, including motor velocity, torque, power consumption, phase current, temperature, and more. This poses an excellent opportunity to use non-intrusive embedded machine learning to add an extra layer of sophistication to the system.

In this project we will learn how to:
- Collect data from an ODrive motor controller (though any motor controller that allows querying power data can be used)
- Import our data into the Edge Impulse studio using the Data forwarder
- Discover how to create a K-means anomaly detection model that is small enough to run on a Raspberry Pi Pico
Finally we will see how to use the Arduino library generated by Edge Impulse and combine it with our own custom code. Let's go!
Most of the magic is going to happen in the Edge Impulse studio, so if you're following along be sure to open a free account! For those who don't know, Edge Impulse is an engineer-focused platform designed to streamline the process of building machine learning models for edge / embedded devices.
Next, for our motor setup we will be using an ODrive V3.6 (24V) controller with a brushless motor (D5065) from the same company. ODrive manufactures affordable yet robust motor control hardware that can be interfaced with via USB or UART serial connection.
Any motor controller that allows querying power data over serial connection can be used!

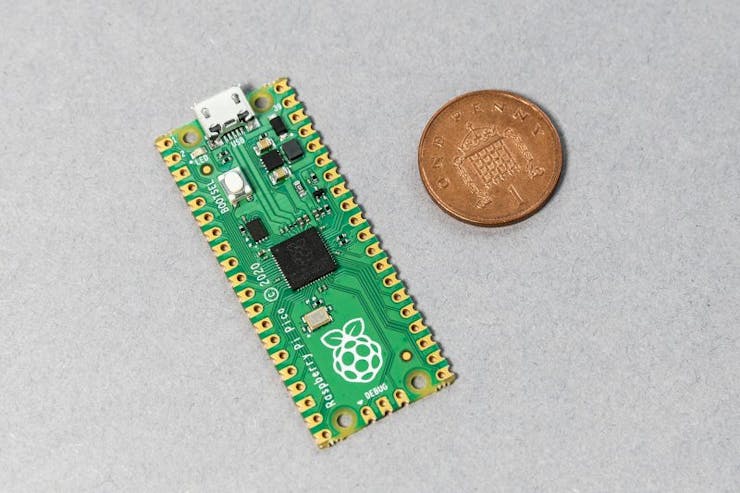
Finally, for our main computing unit we will be using a Raspberry Pi Pico. This tiny board packs an RP2040 (Arm Cortex-M0+) microcontroller. Be sure to check out Edge Impulse's official guide on this board.
...let's define our goal here. This project is meant to serve as a "get started" reference for leveraging Edge Impulse and TinyML to perform industrial motor predictive maintenance (PdM). From a quick glance at the ODrive developer reference document it is plain to see that there are plenty of data elements that we could choose to create features and build our machine learning model, but regardless of what you choose for your specific use case the steps should be similar.
For this tutorial we'll be using motor power as the driving parameter for our predictive maintenance model. Without using any additional sensors and relying on motor power data alone we can create an anomaly detection model that can alert when faults are detected.
In future tutorials we will explore the use of classification models to recognize specific faults such as bearing faults, axle misalignments, axle disjoints, etc. For now we will train our model using nominal, intact data, and use anomaly detection to detect behavior that falls outside of the norm.
What can motor power data tell us?
Ohm's law tells us that power = current * voltage, therefore tracking a motor's power consumption allows us to consider the behavior of both current and voltage concurrently. A popular method used to monitor motor behavior is "Instantaneous Power Signature Analysis", or IPSA. Essentially a motor's power is analyzed in the frequency domain in order to uncover external interference - whether mechanical or electrical. You can read more about IPSA in this academic article:
Predictive Maintenance by Electrical Signature Analysis to Induction Motors. 10.5772/48045. Bonaldi, E.L. & Oliveira, Levy & Borges da Silva, Jonas & Lambert-Torres, Germano & SILVA, L.E.. (2012). [page 500].
In this tutorial we will be using spectral analysis to generate features for our anomaly detection model.
Data forwarder
One of Edge Impulse's most convenient tools is their data forwarder. This tool allows you to stream data directly to the Edge Impulse platform regardless of the data source. We will use an Arduino script to create a data stream that the data forwarder can listen to.
It's recommended to check out the official guide on Edge Impulse's data forwarder here, and check out the ODrive specific data forwarding Arduino script attached to this tutorial ("odrive_data_forwarding.ino")!
We'll run the attached code on our Arduino while it's connected via UART to our ODrive board. You can read about the ODrive UART interface here.
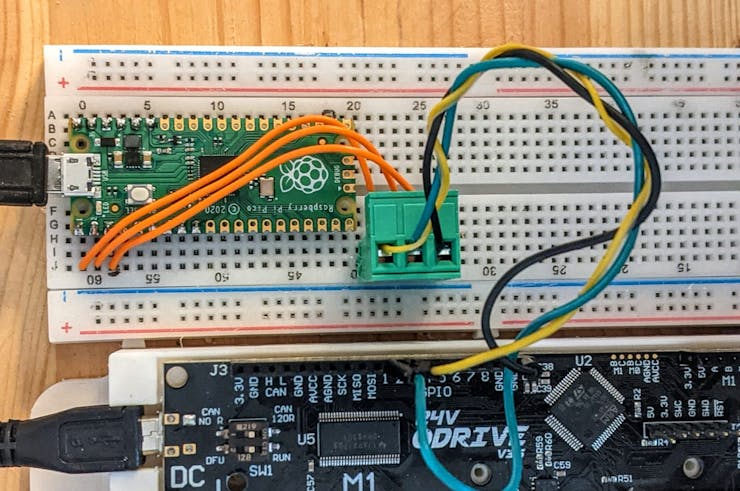
We don't need to use any external sensors (no accelerometers or microphones here!) - we can use the motor controller's built-in parameters and circuitry to gather powerful data.
Collecting data
We need to collect data to train our machine learning model. For this tutorial we will be recording only nominal performance. That means there is no need to perform fault simulation in order to detect "faulty" data, which can be an intrusive and dangerous process. The anomaly detection model will tell us when the power signal from the motor is behaving in a way that the model hasn't seen before.
There are plenty of ways to upload training data using Edge Impulse. For example, it's possible to upload .CSV files with the relevant data, or you can use the convenient Edge Impulse Data Forwarder to stream data live over serial, which is what we'll be doing in this tutorial.
Let's say we set a motor rotating with random changes in velocity in order to simulate the motion of a robotic arm or something of the like. Here's a video of what that might look like.
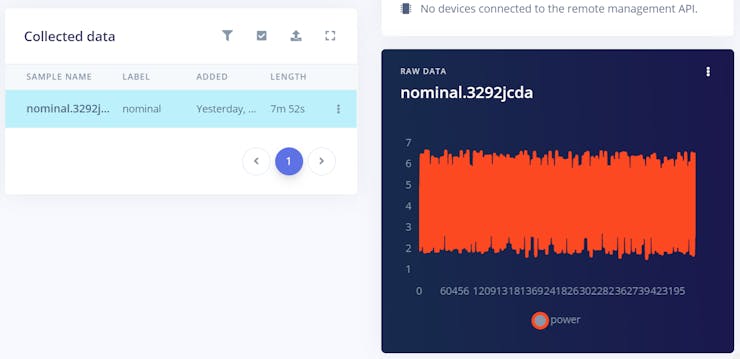
Let's take a look at 1 second of power consumption data from this motion:
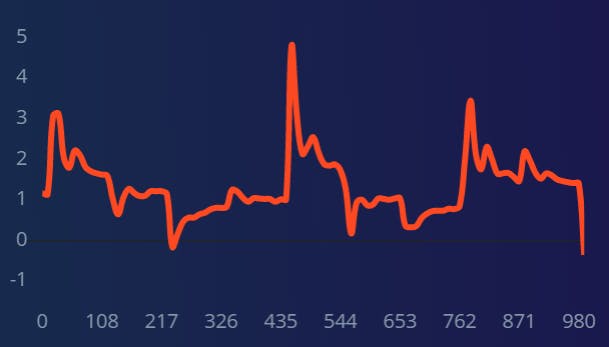
Since the commanded motor velocity is constantly changing, so is the motor power signal.
Assuming you've gone through the Getting Started guide and have made an account with Edge Impulse, go ahead and make a new project.
Following the guide for using Edge Impulse's data forwarder we should see our virtual device appear when we click Data acquisition:
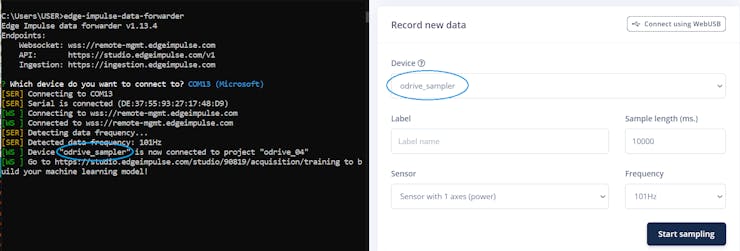
Let's set our motor in motion (as shown in the video above) and click "Start sampling" to begin sending data to the Edge Impulse platform. Feel free to leave this running for a long time -- the more data the better!
It's time to create an impulse, which is comprised of a series of configuration / processing blocks. First up is setting the type of data we're using, which in this case is "Time series data". This block will split our long samples into shorter windows. Next we decide what type of processing we want performed on our data. In this tutorial we'll be using "Spectral analysis", which looks at the behavior of the signals in the frequency domain. Finally we decide what sort of neural network we want to feed the results of the spectral analysis to. For this we will select "Anomaly detection (K-means)":
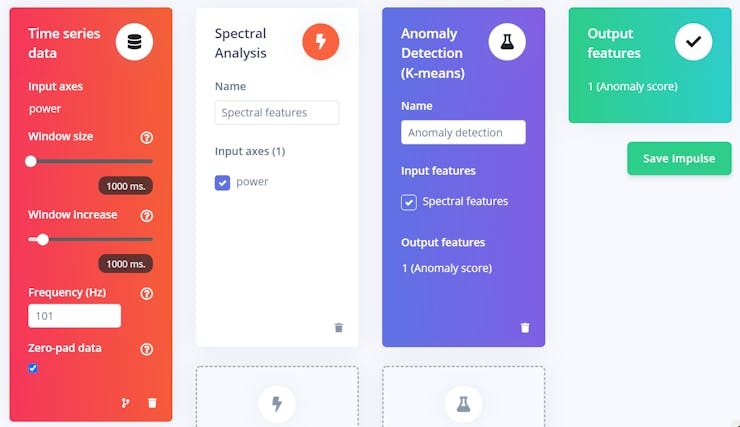
This impulse is the heart of our model. Once we click "Save Impulse" we can move to the "Spectral analysis" screen (select from menu on the left).
Spectral analysis
When we train our machine learning model we're not actually feeding raw, signal level samples to the model, rather we feed it features generated by digital signal processing. Using spectral analysis we can create sets of information about how our signal behaves in the frequency domain.
After we click "Save Impulse", let's navigate to the "Spectral analysis" window. Here we can make adjustments to the DSP block in our impulse. Among other things we can set filter types and immediately view the filtered data. The default filter setting is a low pass filter, but this can and should be adjusted according to the type of anomalies the engineer is trying to detect.
Once we're happy with our DSP block settings, we can click "Save parameters" and then navigate to the next screen - "Generate features".
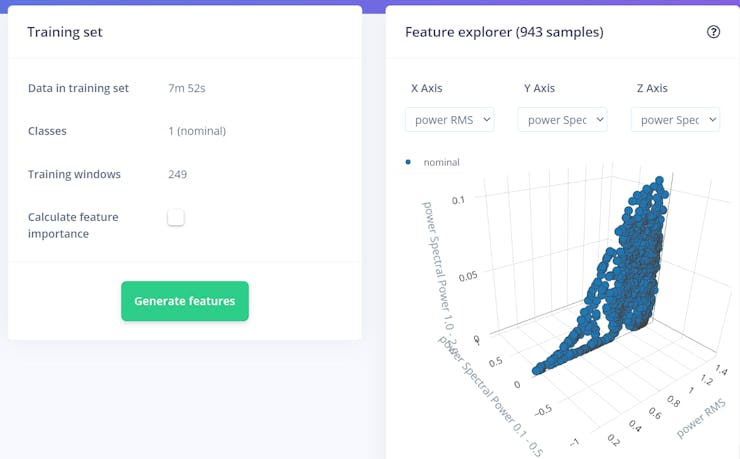
Now we're ready to apply the signal processing to our data. In the "Generate features" screen, click "Generate features" and wait a few moments for Edge Impulse to create spectral features for each one of the samples:
We're ready to move on to the next block where we create our machine learning model. We're almost done! Once we've generated the DSP features we can navigate to the next screen "Anomaly detection" from the menu on the left.
On this screen we can set the number of clusters, as well as select the axes according to which our data will be clustered. For this example all axes were selected, but if you know that certain axes are more / less important it's best to select them accordingly (this can be determined by using samples where the motor is experiencing faulty behavior and using the Calculate feature importance _option in the Generate features section. More on this here.)
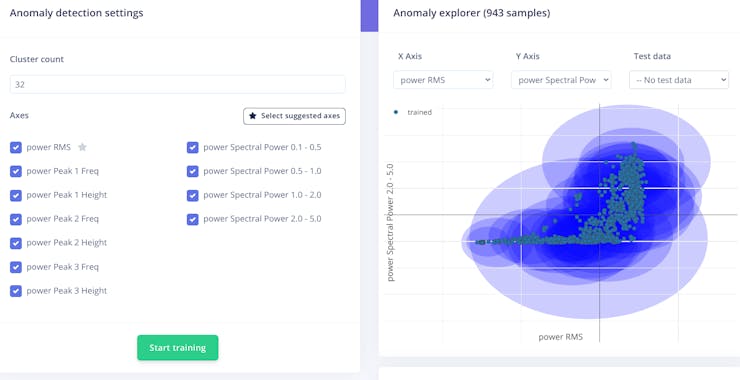
In the graph above, each sample in represented by a dot, and the surrounding circles represent the clusters. These clusters can be thought of as regions of typical behavior. Our model will notify us not only when a new sample falls outside of the clusters, but by how much!
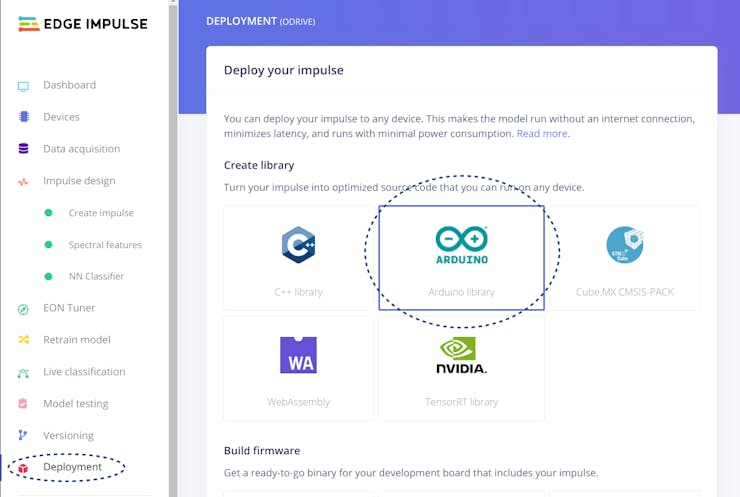
Our model is ready for deployment in the form of our choosing! For this tutorial we'll export our model as an Arduino library that we can invoke from within our custom Arduino scripts. Navigate to the "Deployment" screen, select "Arduino library", and hit "Build" on the bottom of the screen.
It's recommended to follow this guide to learn how to call your Edge Impulse model from within Arduino code. The example in the guide is for use with an accelerometer, but the principle is the same!
Using the Arduino IDE we will need to import the .ZIP folder into the Arduino library folder using Sketch -> Include library... -> Add .ZIP folder... Once we add the .ZIP folder from Edge Impulse we can import our inferencing library like this:
#include <your_project_inference.h>
(You can peek inside the project .ZIP folder inside src to see the exact name of the header file!)
Combining the example code from the guide referenced above with custom code for gathering data from our ODrive (or whatever motor controller you happen to be using!), we'll end up with something like this. Please feel free to ask questions about the code if something is unclear.