 +
+
+
+
 +
+
+## Summary
+
+This package performs object detection in the ROS2 environment. There are certainly more sophisticated object detection frameworks out there, eg.
+[NVIDIA Isaac](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_object_detection).
+
+The chief virtue of this package is the simplicity of the codebase and use of standardised ROS2 messages, with the goal of being simple to understand and to use.
+
+## Packages
+
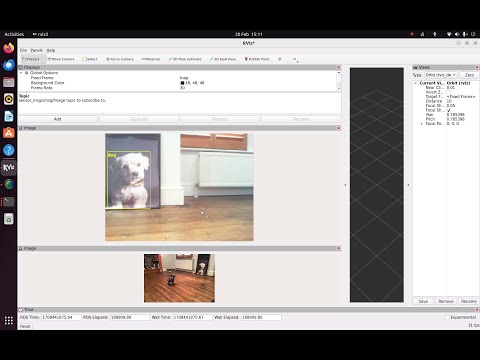
+coco_detector: package containing coco_detector_node for listening on ROS2 topic /image and publishing ROS2 Detection2DArray message on topic /detected_objects. Also (by default) publishes Image (with labels and bounding boxes) message on topic /annotated_image. The object detection is performed by PyTorch using MobileNet.
+
+### Tested Hardware
+
+Dell Precision Tower 2210, NVIDIA RTX2070 (GPU is optional)
+
+### Tested Software
+
+Ubuntu 22.04, ROS2 Humble (RoboStack), PyTorch 2.1.2, CUDA 12.2 (CUDA is only needed if you require GPU)
+
+## Installation - historical reference only
+
+NOTE - outdated - not relevant - for historial reference only.
+
+Follow the [RoboStack](https://robostack.github.io/GettingStarted.html) installation instructions to install ROS2
+
+(Ensure you have also followed the step Installation tools for local development in the above instructions)
+
+Follow the [PyTorch](https://pytorch.org/) installation instructions to install PyTorch (selecting the conda option).
+
+```
+mamba activate ros2 # (use the name here you decided to call this conda environment)
+mamba install ros-humble-image-tools
+mamba install ros-humble-vision-msgs
+cd ~
+mkdir -p ros2_ws/src
+cd ros2_ws
+git -C src clone https://github.com/jfrancis71/ros2_coco_detector.git
+colcon build --symlink-install
+```
+You may receive a warning on the colcon build step: "SetuptoolsDeprecationWarning: setup.py install is deprecated", this can be ignored.
+
+The above steps assume a RoboStack mamba/conda ROS2 install. If using other installation process, replace the RoboStack image-tools and vision-msgs packages install steps with whichever command is appropriate for your environment. The image-tools package is not required for coco_detector, it is just used in the steps below for convenient demonstration. However vision-msgs is required (this is where the ROS2 DetectionArray2D message is defined)
+
+## Activate Environment
+
+```
+mamba activate ros2 # (use the name here you decided to call this conda environment)
+cd ~/ros2_ws
+source ./install/setup.bash
+```
+
+## Verify Install
+
+Launch a camera stream:
+```
+ros2 run image_tools cam2image
+```
+
+On another terminal enter:
+```
+ros2 run coco_detector coco_detector_node
+```
+There will be a short delay the first time the node is run for PyTorch TorchVision to download the neural network. You should see a downloading progress bar. This network is then cached for subsequent runs.
+
+On another terminal to view the detection messages:
+```
+ros2 topic echo /detected_objects
+```
+To view the image stream annotated with the labels and bounding boxes:
+```
+ros2 run image_tools showimage --ros-args -r /image:=/annotated_image
+```
+
+Example Use:
+
+```
+ros2 run coco_detector coco_detector_node --ros-args -p publish_annotated_image:=False -p device:=cuda -p detection_threshold:=0.7
+```
+
+This will run the coco detector without publishing the annotated image (it is True by default) using the default CUDA device (device=cpu by default). It sets the detection_threshold to 0.7 (it is 0.9 by default). The detection_threshold should be between 0.0 and 1.0; the higher this number the more detections will be rejected. If you have too many false detections try increasing this number. Thus only Detection2DArray messages are published on topic /detected_objects.
+
+
+## Suggested Setup For Mobile Robotics
+
+These suggestions are for a Raspberry Pi 3 Model B+ running ROS2.
+
+As of 16/02/2024, the PyTorch Conda install does not appear to be working for Raspberry Pi 3 Model B+.
+There may be other installation options, but I have not explored that.
+
+As an alternative if you have a ROS2 workstation connected to the same network, I suggest publishing the compressed image on the Raspberry Pi and running the COCO detector on the workstation.
+
+The below setup involves the ROS2 compression transport on both the Raspberry Pi and workstation. If using RoboStack ROS2 Humble you can install on each with:
+
+```mamba install ros-humble-compressed-image-transport```
+
+Raspberry Pi (run each command in seperate terminals):
+
+```ros2 run image_tools cam2image --ros-args -r /image:=/charlie/image```
+
+```ros2 run image_transport republish raw compressed --ros-args -r in:=/charlie/image -r out/compressed:=/charlie/compressed```
+
+Workstation (run each command in seperate terminals):
+
+```ros2 run image_transport republish compressed raw --ros-args -r /in/compressed:=/charlie/compressed -r /out:=/server/image```
+
+```ros2 run coco_detector coco_detector_node --ros-args -r /image:=/server/image```
+
+I have relabelled topic names for clarity and keeping the image topics on the different machines seperate. Compression is not necessary, but I have poor performance on my network without compression.
+
+Note you could use launch files (for convenience) to run the above nodes. I do not cover that here as it will be specific to your setup.
+
+## Notes
+
+The ROS2 documentation suggests that the ObjectHypotheses.class_id should be an identifier that the client should then look up in a database. This seems more complex than I have a need for. So this implementation just places the class label here directly, eg. class_id = "dog". See the ROS2 Vision Msgs Github link in the external links section below for more details.
+
+## External Links
+
+[COCO Dataset Homepage](https://cocodataset.org/#home)
+
+[Microsoft COCO: Common Objects in Context](http://arxiv.org/abs/1405.0312)
+
+[PyTorch MobileNet](https://pytorch.org/vision/stable/models/generated/torchvision.models.detection.fasterrcnn_mobilenet_v3_large_320_fpn.html)
+
+[MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications](https://arxiv.org/abs/1704.04861)
+
+[ROS2 Vision Msgs Github repo](https://github.com/ros-perception/vision_msgs)
diff --git a/coco_detector/coco_detector/__init__.py b/coco_detector/coco_detector/__init__.py
new file mode 100644
index 0000000..e69de29
diff --git a/coco_detector/coco_detector/coco_detector_node.py b/coco_detector/coco_detector/coco_detector_node.py
new file mode 100644
index 0000000..64934a2
--- /dev/null
+++ b/coco_detector/coco_detector/coco_detector_node.py
@@ -0,0 +1,120 @@
+"""Detects COCO objects in image and publishes in ROS2.
+
+Subscribes to /image and publishes Detection2DArray message on topic /detected_objects.
+Also publishes (by default) annotated image with bounding boxes on /annotated_image.
+Uses PyTorch and FasterRCNN_MobileNet model from torchvision.
+Bounding Boxes use image convention, ie center.y = 0 means top of image.
+"""
+
+import collections
+import numpy as np
+import rclpy
+from rclpy.node import Node
+from sensor_msgs.msg import Image
+from vision_msgs.msg import BoundingBox2D, ObjectHypothesis, ObjectHypothesisWithPose
+from vision_msgs.msg import Detection2D, Detection2DArray
+from cv_bridge import CvBridge
+import torch
+from torchvision.models import detection as detection_model
+from torchvision.utils import draw_bounding_boxes
+
+Detection = collections.namedtuple("Detection", "label, bbox, score")
+
+class CocoDetectorNode(Node):
+ """Detects COCO objects in image and publishes on ROS2.
+
+ Subscribes to /image and publishes Detection2DArray on /detected_objects.
+ Also publishes augmented image with bounding boxes on /annotated_image.
+ """
+
+ # pylint: disable=R0902 disable too many instance variables warning for this class
+ def __init__(self):
+ super().__init__("coco_detector_node")
+ self.declare_parameter('device', 'cpu')
+ self.declare_parameter('detection_threshold', 0.9)
+ self.declare_parameter('publish_annotated_image', True)
+ self.device = self.get_parameter('device').get_parameter_value().string_value
+ self.detection_threshold = \
+ self.get_parameter('detection_threshold').get_parameter_value().double_value
+ self.subscription = self.create_subscription(
+ Image,
+ "/go2_camera/color/image",
+ self.listener_callback,
+ 10)
+ self.detected_objects_publisher = \
+ self.create_publisher(Detection2DArray, "detected_objects", 10)
+ if self.get_parameter('publish_annotated_image').get_parameter_value().bool_value:
+ self.annotated_image_publisher = \
+ self.create_publisher(Image, "annotated_image", 10)
+ else:
+ self.annotated_image_publisher = None
+ self.bridge = CvBridge()
+ self.model = detection_model.fasterrcnn_mobilenet_v3_large_320_fpn(
+ weights="FasterRCNN_MobileNet_V3_Large_320_FPN_Weights.COCO_V1",
+ progress=True,
+ weights_backbone="MobileNet_V3_Large_Weights.IMAGENET1K_V1").to(self.device)
+ self.class_labels = \
+ detection_model.FasterRCNN_MobileNet_V3_Large_320_FPN_Weights.DEFAULT.meta["categories"]
+ self.model.eval()
+ self.get_logger().info("Node has started.")
+
+ def mobilenet_to_ros2(self, detection, header):
+ """Converts a Detection tuple(label, bbox, score) to a ROS2 Detection2D message."""
+
+ detection2d = Detection2D()
+ detection2d.header = header
+ object_hypothesis_with_pose = ObjectHypothesisWithPose()
+ object_hypothesis = ObjectHypothesis()
+ object_hypothesis.class_id = self.class_labels[detection.label]
+ object_hypothesis.score = detection.score.detach().item()
+ object_hypothesis_with_pose.hypothesis = object_hypothesis
+ detection2d.results.append(object_hypothesis_with_pose)
+ bounding_box = BoundingBox2D()
+ bounding_box.center.position.x = float((detection.bbox[0] + detection.bbox[2]) / 2)
+ bounding_box.center.position.y = float((detection.bbox[1] + detection.bbox[3]) / 2)
+ bounding_box.center.theta = 0.0
+ bounding_box.size_x = float(2 * (bounding_box.center.position.x - detection.bbox[0]))
+ bounding_box.size_y = float(2 * (bounding_box.center.position.y - detection.bbox[1]))
+ detection2d.bbox = bounding_box
+ return detection2d
+
+ def publish_annotated_image(self, filtered_detections, header, image):
+ """Draws the bounding boxes on the image and publishes to /annotated_image"""
+
+ if len(filtered_detections) > 0:
+ pred_boxes = torch.stack([detection.bbox for detection in filtered_detections])
+ pred_labels = [self.class_labels[detection.label] for detection in filtered_detections]
+ annotated_image = draw_bounding_boxes(torch.tensor(image), pred_boxes,
+ pred_labels, colors="yellow")
+ else:
+ annotated_image = torch.tensor(image)
+ ros2_image_msg = self.bridge.cv2_to_imgmsg(annotated_image.numpy().transpose(1, 2, 0),
+ encoding="rgb8")
+ ros2_image_msg.header = header
+ self.annotated_image_publisher.publish(ros2_image_msg)
+
+ def listener_callback(self, msg):
+ """Reads image and publishes on /detected_objects and /annotated_image."""
+ cv_image = self.bridge.imgmsg_to_cv2(msg, desired_encoding="rgb8")
+ image = cv_image.copy().transpose((2, 0, 1))
+ batch_image = np.expand_dims(image, axis=0)
+ tensor_image = torch.tensor(batch_image/255.0, dtype=torch.float, device=self.device)
+ mobilenet_detections = self.model(tensor_image)[0] # pylint: disable=E1102 disable not callable warning
+ filtered_detections = [Detection(label_id, box, score) for label_id, box, score in
+ zip(mobilenet_detections["labels"],
+ mobilenet_detections["boxes"],
+ mobilenet_detections["scores"]) if score >= self.detection_threshold]
+ detection_array = Detection2DArray()
+ detection_array.header = msg.header
+ detection_array.detections = \
+ [self.mobilenet_to_ros2(detection, msg.header) for detection in filtered_detections]
+ self.detected_objects_publisher.publish(detection_array)
+ if self.annotated_image_publisher is not None:
+ self.publish_annotated_image(filtered_detections, msg.header, image)
+
+
+rclpy.init()
+coco_detector_node = CocoDetectorNode()
+rclpy.spin(coco_detector_node)
+coco_detector_node.destroy_node()
+rclpy.shutdown()
diff --git a/coco_detector/package.xml b/coco_detector/package.xml
new file mode 100644
index 0000000..44f7e83
--- /dev/null
+++ b/coco_detector/package.xml
@@ -0,0 +1,18 @@
+
+
+
+
+
+## Summary
+
+This package performs object detection in the ROS2 environment. There are certainly more sophisticated object detection frameworks out there, eg.
+[NVIDIA Isaac](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_object_detection).
+
+The chief virtue of this package is the simplicity of the codebase and use of standardised ROS2 messages, with the goal of being simple to understand and to use.
+
+## Packages
+
+coco_detector: package containing coco_detector_node for listening on ROS2 topic /image and publishing ROS2 Detection2DArray message on topic /detected_objects. Also (by default) publishes Image (with labels and bounding boxes) message on topic /annotated_image. The object detection is performed by PyTorch using MobileNet.
+
+### Tested Hardware
+
+Dell Precision Tower 2210, NVIDIA RTX2070 (GPU is optional)
+
+### Tested Software
+
+Ubuntu 22.04, ROS2 Humble (RoboStack), PyTorch 2.1.2, CUDA 12.2 (CUDA is only needed if you require GPU)
+
+## Installation - historical reference only
+
+NOTE - outdated - not relevant - for historial reference only.
+
+Follow the [RoboStack](https://robostack.github.io/GettingStarted.html) installation instructions to install ROS2
+
+(Ensure you have also followed the step Installation tools for local development in the above instructions)
+
+Follow the [PyTorch](https://pytorch.org/) installation instructions to install PyTorch (selecting the conda option).
+
+```
+mamba activate ros2 # (use the name here you decided to call this conda environment)
+mamba install ros-humble-image-tools
+mamba install ros-humble-vision-msgs
+cd ~
+mkdir -p ros2_ws/src
+cd ros2_ws
+git -C src clone https://github.com/jfrancis71/ros2_coco_detector.git
+colcon build --symlink-install
+```
+You may receive a warning on the colcon build step: "SetuptoolsDeprecationWarning: setup.py install is deprecated", this can be ignored.
+
+The above steps assume a RoboStack mamba/conda ROS2 install. If using other installation process, replace the RoboStack image-tools and vision-msgs packages install steps with whichever command is appropriate for your environment. The image-tools package is not required for coco_detector, it is just used in the steps below for convenient demonstration. However vision-msgs is required (this is where the ROS2 DetectionArray2D message is defined)
+
+## Activate Environment
+
+```
+mamba activate ros2 # (use the name here you decided to call this conda environment)
+cd ~/ros2_ws
+source ./install/setup.bash
+```
+
+## Verify Install
+
+Launch a camera stream:
+```
+ros2 run image_tools cam2image
+```
+
+On another terminal enter:
+```
+ros2 run coco_detector coco_detector_node
+```
+There will be a short delay the first time the node is run for PyTorch TorchVision to download the neural network. You should see a downloading progress bar. This network is then cached for subsequent runs.
+
+On another terminal to view the detection messages:
+```
+ros2 topic echo /detected_objects
+```
+To view the image stream annotated with the labels and bounding boxes:
+```
+ros2 run image_tools showimage --ros-args -r /image:=/annotated_image
+```
+
+Example Use:
+
+```
+ros2 run coco_detector coco_detector_node --ros-args -p publish_annotated_image:=False -p device:=cuda -p detection_threshold:=0.7
+```
+
+This will run the coco detector without publishing the annotated image (it is True by default) using the default CUDA device (device=cpu by default). It sets the detection_threshold to 0.7 (it is 0.9 by default). The detection_threshold should be between 0.0 and 1.0; the higher this number the more detections will be rejected. If you have too many false detections try increasing this number. Thus only Detection2DArray messages are published on topic /detected_objects.
+
+
+## Suggested Setup For Mobile Robotics
+
+These suggestions are for a Raspberry Pi 3 Model B+ running ROS2.
+
+As of 16/02/2024, the PyTorch Conda install does not appear to be working for Raspberry Pi 3 Model B+.
+There may be other installation options, but I have not explored that.
+
+As an alternative if you have a ROS2 workstation connected to the same network, I suggest publishing the compressed image on the Raspberry Pi and running the COCO detector on the workstation.
+
+The below setup involves the ROS2 compression transport on both the Raspberry Pi and workstation. If using RoboStack ROS2 Humble you can install on each with:
+
+```mamba install ros-humble-compressed-image-transport```
+
+Raspberry Pi (run each command in seperate terminals):
+
+```ros2 run image_tools cam2image --ros-args -r /image:=/charlie/image```
+
+```ros2 run image_transport republish raw compressed --ros-args -r in:=/charlie/image -r out/compressed:=/charlie/compressed```
+
+Workstation (run each command in seperate terminals):
+
+```ros2 run image_transport republish compressed raw --ros-args -r /in/compressed:=/charlie/compressed -r /out:=/server/image```
+
+```ros2 run coco_detector coco_detector_node --ros-args -r /image:=/server/image```
+
+I have relabelled topic names for clarity and keeping the image topics on the different machines seperate. Compression is not necessary, but I have poor performance on my network without compression.
+
+Note you could use launch files (for convenience) to run the above nodes. I do not cover that here as it will be specific to your setup.
+
+## Notes
+
+The ROS2 documentation suggests that the ObjectHypotheses.class_id should be an identifier that the client should then look up in a database. This seems more complex than I have a need for. So this implementation just places the class label here directly, eg. class_id = "dog". See the ROS2 Vision Msgs Github link in the external links section below for more details.
+
+## External Links
+
+[COCO Dataset Homepage](https://cocodataset.org/#home)
+
+[Microsoft COCO: Common Objects in Context](http://arxiv.org/abs/1405.0312)
+
+[PyTorch MobileNet](https://pytorch.org/vision/stable/models/generated/torchvision.models.detection.fasterrcnn_mobilenet_v3_large_320_fpn.html)
+
+[MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications](https://arxiv.org/abs/1704.04861)
+
+[ROS2 Vision Msgs Github repo](https://github.com/ros-perception/vision_msgs)
diff --git a/coco_detector/coco_detector/__init__.py b/coco_detector/coco_detector/__init__.py
new file mode 100644
index 0000000..e69de29
diff --git a/coco_detector/coco_detector/coco_detector_node.py b/coco_detector/coco_detector/coco_detector_node.py
new file mode 100644
index 0000000..64934a2
--- /dev/null
+++ b/coco_detector/coco_detector/coco_detector_node.py
@@ -0,0 +1,120 @@
+"""Detects COCO objects in image and publishes in ROS2.
+
+Subscribes to /image and publishes Detection2DArray message on topic /detected_objects.
+Also publishes (by default) annotated image with bounding boxes on /annotated_image.
+Uses PyTorch and FasterRCNN_MobileNet model from torchvision.
+Bounding Boxes use image convention, ie center.y = 0 means top of image.
+"""
+
+import collections
+import numpy as np
+import rclpy
+from rclpy.node import Node
+from sensor_msgs.msg import Image
+from vision_msgs.msg import BoundingBox2D, ObjectHypothesis, ObjectHypothesisWithPose
+from vision_msgs.msg import Detection2D, Detection2DArray
+from cv_bridge import CvBridge
+import torch
+from torchvision.models import detection as detection_model
+from torchvision.utils import draw_bounding_boxes
+
+Detection = collections.namedtuple("Detection", "label, bbox, score")
+
+class CocoDetectorNode(Node):
+ """Detects COCO objects in image and publishes on ROS2.
+
+ Subscribes to /image and publishes Detection2DArray on /detected_objects.
+ Also publishes augmented image with bounding boxes on /annotated_image.
+ """
+
+ # pylint: disable=R0902 disable too many instance variables warning for this class
+ def __init__(self):
+ super().__init__("coco_detector_node")
+ self.declare_parameter('device', 'cpu')
+ self.declare_parameter('detection_threshold', 0.9)
+ self.declare_parameter('publish_annotated_image', True)
+ self.device = self.get_parameter('device').get_parameter_value().string_value
+ self.detection_threshold = \
+ self.get_parameter('detection_threshold').get_parameter_value().double_value
+ self.subscription = self.create_subscription(
+ Image,
+ "/go2_camera/color/image",
+ self.listener_callback,
+ 10)
+ self.detected_objects_publisher = \
+ self.create_publisher(Detection2DArray, "detected_objects", 10)
+ if self.get_parameter('publish_annotated_image').get_parameter_value().bool_value:
+ self.annotated_image_publisher = \
+ self.create_publisher(Image, "annotated_image", 10)
+ else:
+ self.annotated_image_publisher = None
+ self.bridge = CvBridge()
+ self.model = detection_model.fasterrcnn_mobilenet_v3_large_320_fpn(
+ weights="FasterRCNN_MobileNet_V3_Large_320_FPN_Weights.COCO_V1",
+ progress=True,
+ weights_backbone="MobileNet_V3_Large_Weights.IMAGENET1K_V1").to(self.device)
+ self.class_labels = \
+ detection_model.FasterRCNN_MobileNet_V3_Large_320_FPN_Weights.DEFAULT.meta["categories"]
+ self.model.eval()
+ self.get_logger().info("Node has started.")
+
+ def mobilenet_to_ros2(self, detection, header):
+ """Converts a Detection tuple(label, bbox, score) to a ROS2 Detection2D message."""
+
+ detection2d = Detection2D()
+ detection2d.header = header
+ object_hypothesis_with_pose = ObjectHypothesisWithPose()
+ object_hypothesis = ObjectHypothesis()
+ object_hypothesis.class_id = self.class_labels[detection.label]
+ object_hypothesis.score = detection.score.detach().item()
+ object_hypothesis_with_pose.hypothesis = object_hypothesis
+ detection2d.results.append(object_hypothesis_with_pose)
+ bounding_box = BoundingBox2D()
+ bounding_box.center.position.x = float((detection.bbox[0] + detection.bbox[2]) / 2)
+ bounding_box.center.position.y = float((detection.bbox[1] + detection.bbox[3]) / 2)
+ bounding_box.center.theta = 0.0
+ bounding_box.size_x = float(2 * (bounding_box.center.position.x - detection.bbox[0]))
+ bounding_box.size_y = float(2 * (bounding_box.center.position.y - detection.bbox[1]))
+ detection2d.bbox = bounding_box
+ return detection2d
+
+ def publish_annotated_image(self, filtered_detections, header, image):
+ """Draws the bounding boxes on the image and publishes to /annotated_image"""
+
+ if len(filtered_detections) > 0:
+ pred_boxes = torch.stack([detection.bbox for detection in filtered_detections])
+ pred_labels = [self.class_labels[detection.label] for detection in filtered_detections]
+ annotated_image = draw_bounding_boxes(torch.tensor(image), pred_boxes,
+ pred_labels, colors="yellow")
+ else:
+ annotated_image = torch.tensor(image)
+ ros2_image_msg = self.bridge.cv2_to_imgmsg(annotated_image.numpy().transpose(1, 2, 0),
+ encoding="rgb8")
+ ros2_image_msg.header = header
+ self.annotated_image_publisher.publish(ros2_image_msg)
+
+ def listener_callback(self, msg):
+ """Reads image and publishes on /detected_objects and /annotated_image."""
+ cv_image = self.bridge.imgmsg_to_cv2(msg, desired_encoding="rgb8")
+ image = cv_image.copy().transpose((2, 0, 1))
+ batch_image = np.expand_dims(image, axis=0)
+ tensor_image = torch.tensor(batch_image/255.0, dtype=torch.float, device=self.device)
+ mobilenet_detections = self.model(tensor_image)[0] # pylint: disable=E1102 disable not callable warning
+ filtered_detections = [Detection(label_id, box, score) for label_id, box, score in
+ zip(mobilenet_detections["labels"],
+ mobilenet_detections["boxes"],
+ mobilenet_detections["scores"]) if score >= self.detection_threshold]
+ detection_array = Detection2DArray()
+ detection_array.header = msg.header
+ detection_array.detections = \
+ [self.mobilenet_to_ros2(detection, msg.header) for detection in filtered_detections]
+ self.detected_objects_publisher.publish(detection_array)
+ if self.annotated_image_publisher is not None:
+ self.publish_annotated_image(filtered_detections, msg.header, image)
+
+
+rclpy.init()
+coco_detector_node = CocoDetectorNode()
+rclpy.spin(coco_detector_node)
+coco_detector_node.destroy_node()
+rclpy.shutdown()
diff --git a/coco_detector/package.xml b/coco_detector/package.xml
new file mode 100644
index 0000000..44f7e83
--- /dev/null
+++ b/coco_detector/package.xml
@@ -0,0 +1,18 @@
+
+
+