The Modia Tutorial provides an introduction to Modia. The Modia3D Tutorial provides an introduction to use 3D components in Modia. Modia is part of ModiaSim.
Modia is an environment in form of a Julia package to model and simulate physical systems (electrical, mechanical, thermo-dynamical, etc.) described by differential and algebraic equations. A user defines a model on a high level with model components (like a mechanical body, an electrical resistance, or a pipe) that are physically connected together. A model component is constructed by expression = expression equations or by Julia structs/functions, such as the pre-defined Modia3D multibody components. The defined model is symbolically processed (for example, equations might be analytically differentiated) with algorithms from package ModiaBase.jl. From the transformed model a Julia function is generated that is used to simulate the model with integrators from DifferentialEquations.jl.
The basic type of the floating point variables is usually Float64, but can be set to any type FloatType <: AbstractFloat via @instantiateModel(..., FloatType = xxx), for example it can be set to Float32, DoubleFloat, Measurement{Float64}, StaticParticles{Float64,100}.
After a simulation, an instantiated model is treated as a signal table and therefore all functions from package SignalTables.jl can be used on it. In particular, the simulation results together with all parameter and start values can be stored on file in JSON or in HDF5 format.
The package is registered and is installed with (Julia >= 1.7 is required):
julia> ]add ModiaFurthermore, one or more of the following packages should be installed in order to be able to generate plots:
julia> ]add SignalTablesInterface_PyPlot # if plotting with PyPlot desired
add SignalTablesInterface_GLMakie # if plotting with GLMakie desired
add SignalTablesInterface_WGLMakie # if plotting with WGLMakie desired
add SignalTablesInterface_CairoMakie # if plotting with CairoMakie desired
# might be sometimes also useful
add SignalTablesor call t = getValues(instantiatedModel, "time"), y = getValues(instantiatedModel, "y") to retrieve
the results in form of vectors and arrays and use any desired plot package for plotting, e.g., plot(t,y).
Note, Modia reexports the following definitions
using Unitfulusing DifferentialEquationsusing SignalTables- and exports functions
CVODE_BDFandIDAof Sundials.jl.
As a result, it is usually sufficient to have using Modia in a model to utilize the relevant
functionalities of these packages.
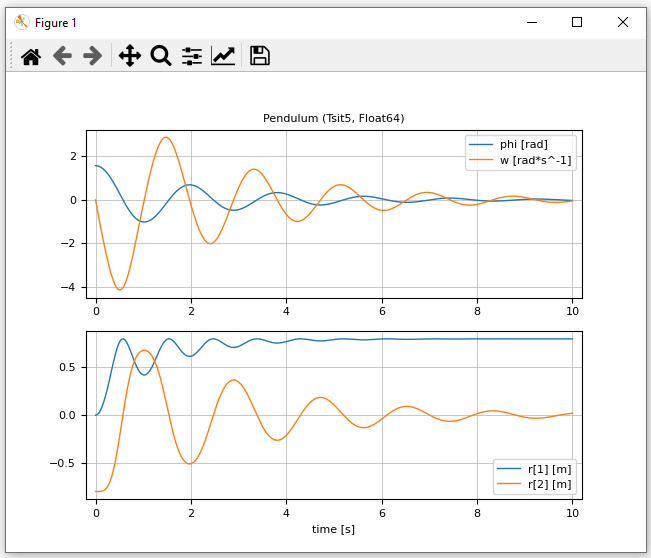
The following equations describe a damped pendulum:

where phi is the rotation angle, omega the angular velocity, m the mass, L the rod length, d a damping constant, g the gravity constant and r the vector from the origin of the world system to the tip of the pendulum. These equations can be defined, simulated and plotted with (note, you can define models also without units, or remove units before the model is processed):
using Modia
Pendulum = Model(
L = 0.8u"m",
m = 1.0u"kg",
d = 0.5u"N*m*s/rad",
g = 9.81u"m/s^2",
phi = Var(init = 1.57*u"rad"),
w = Var(init = 0u"rad/s"),
equations = :[
w = der(phi)
0.0 = m*L^2*der(w) + d*w + m*g*L*sin(phi)
r = [L*cos(phi), -L*sin(phi)]
]
)
pendulum1 = @instantiateModel(Pendulum)
simulate!(pendulum1, Tsit5(), stopTime = 10.0u"s", log=true)
showInfo(pendulum1) # print info about the result
writeSignalTable("pendulum1.json", pendulum1, indent=2, log=true)
@usingModiaPlot # Use plot package defined with
# ENV["SignalTablesPlotPackage"] = "XXX" or with
# usePlotPackage("XXX")
plot(pendulum1, [("phi", "w"); "r"], figure = 1)The result is the following print output
name unit size eltypeOrType kind attributes
─────────────────────────────────────────────────────────────────────────────────────────────────────
time "s" (501,) Float64 Var independent=true
w "rad*s^-1" (501,) Float64 Var start=0 rad s^-1, fixed=true, state=true, der="der…
der(w) "rad*s^-2" (501,) Float64 Var
phi "rad" (501,) Float64 Var start=1.57 rad, fixed=true, state=true, der="der(p…
der(phi) "rad*s^-1" (501,) Float64 Var
r "m" (501,2) Float64 Var
L "m" () Float64 Par
m "kg" () Float64 Par
d "m*N*s*rad^-1" () Float64 Par
g "m*s^-2" () Float64 Parfile pendulum1.json and the following plot:
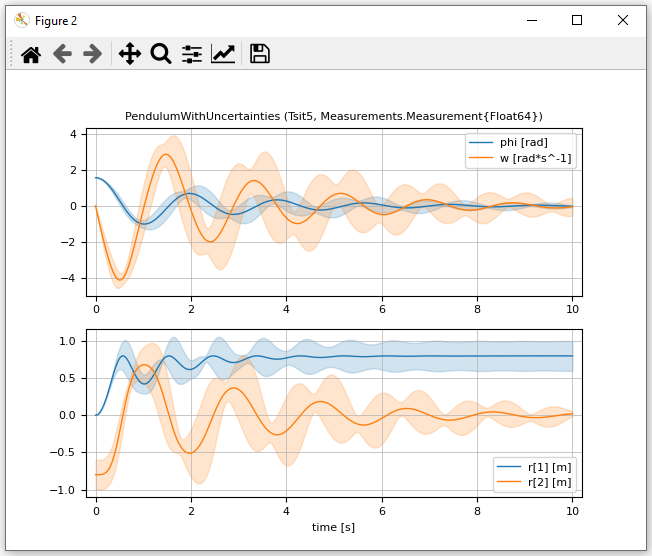
Simulation and plotting of the pendulum with normally distributed uncertainty added to some parameters is performed in the following way:
using Measurements
PendulumWithUncertainties = Pendulum | Map(L = (0.8 ± 0.2)u"m",
m = (1.0 ± 0.2)u"kg",
d = (0.5 ± 0.2)u"N*m*s/rad")
pendulum2 = @instantiateModel(PendulumWithUncertainties,
FloatType = Measurement{Float64})
simulate!(pendulum2, Tsit5(), stopTime = 10.0u"s")
plot(pendulum2, [("phi", "w"); "r"], figure = 2)resulting in the following plot where mean values are shown with thick lines and standard deviations as area around the mean values.