- Make sure your machine satisfies the prerequisites required by Carla: Windows, Linux, Mac*
- IMPORTANT: If on Windows you will need
Make-3.81as per the Carla documentation - If you have previously installed Carla in your PYTHONPATH, you'll need to remove any prior PythonAPI installations
- For instance, if you installed carla via pip, you'll need to uninstall it to proceed.
pip uninstall carla
- For instance, if you installed carla via pip, you'll need to uninstall it to proceed.
-
You should first make sure DReyeVR is downloaded:
git clone https://github.com/HARPLab/DReyeVR --depth 1
-
You'll first need to install Unreal Engine 4.26 (CARLA fork) from source
git clone https://github.com/CarlaUnreal/UnrealEngine # set this location to your $UE4_ROOT environment variableIMPORTANT on DReyeVR for Carla 0.9.13 you'll need to revert the UE4 repository to a supported version (for DReyeVR). This is to optimize the DX11 rendering performance which in our testing has been the optimal render backend for VR.
# in $UE4_ROOT git checkout d40ec35474e8793b4eea60dba6c4f051186e458e # or git reset --hard d40ec35474e8793b4eea60dba6c4f051186e458e
- IMPORTANT: if the
git clonelink does not work for you, you probably need to join the Epic Games Organization to get access to UnrealEngine and all of its forks. - UE4 build instructions for your system can be found here: Windows, Linux, Mac*
- In order to successfully run Setup.sh, you will need to download and replace the Commit.gitdeps.xml file within /Engine/Build. See updated XML file at Commit.gitdeps.xml
- IMPORTANT: if the
-
You'll then need to clone and build a vanilla Carla 0.9.13
git clone https://github.com/carla-simulator/carla -b 0.9.13 --depth 1
- Use Building on Linux for all versions up to Ubuntu 18.04 or Building on Windows to follow their instructions on building CARLA 0.9.13. Use our Ubuntu 20.04 CARLA installation guide for Ubuntu 20.04.
-
(Optional) Similarly, you can install a vanilla Carla Scenario Runner v0.9.13 project to integrate DReyeVR+Carla with Scenario Runner.
git clone https://github.com/carla-simulator/scenario-runner -b v0.9.13 --depth 1
(*=The Mac operating system is no longer officially supported by Carla but our development team has made it possible to build both UE4, Carla, and DReyeVR on new Mac machines with Apple Silicon (arm64) hardware. )
NOTE You'll need a terminal on Linux/Mac. On Windows you'll be fine with the same x64 Native Tools CMD prompt that you used to build Carla.
Show command lines to install and build DReyeVR
mkdir CarlaDReyeVR && cd CarlaDReyeVR # doing everything in this "CarlaDReyeVR" directory
#####################################################
########### install OUR UnrealEngine fork ###########
#####################################################
# Rather than https://github.com/CarlaUnreal/UnrealEngine UE4, you SHOULD clone https://github.com/HARPLab/UnrealEngine
# but otherwise all instructions remain the same.
# Linux: https://carla.readthedocs.io/en/0.9.13/build_linux/#unreal-engine
# Windows: https://carla.readthedocs.io/en/0.9.13/build_windows/#unreal-engine
#####################################################
################### install Carla ###################
#####################################################
# Linux: https://carla.readthedocs.io/en/0.9.13/build_linux/
# Windows: https://carla.readthedocs.io/en/0.9.13/build_windows/
git clone https://github.com/carla-simulator/carla -b 0.9.13 --depth 1
cd carla
./Update.sh # linux/mac
Update.bat # Windows
make PythonAPI && make launch # to build vanilla Carla
#####################################################
############## install DReyeVR plugins ##############
#####################################################
# (optional) install SRanipal (eye tracking)
mv /PATH/TO/SRANIPALPLUGIN/SDK/03_Unreal/Plugins/SRanipal Unreal/CarlaUE4/Plugins/
# (optional) install LogitechWheelPlugin (steering wheel)
git clone https://github.com/HARPLab/LogitechWheelPlugin
mv LogitechWheelPlugin/LogitechWheelPlugin Unreal/CarlaUE4/Plugins/ # install to carla
cd .. # back to main directory
#####################################################
############## install scenario_runner ##############
#####################################################
# (optional) while you don't NEED scenario runner, it is certainly useful from a research pov
git clone https://github.com/carla-simulator/scenario_runner -b v0.9.13
#####################################################
################## install DReyeVR ##################
#####################################################
git clone https://github.com/HARPLab/DReyeVR
cd DReyeVR
# the CARLA= and SR= variables are optional
make install CARLA=../carla SR=../scenario_runner
# or
make install CARLA=../carla
make install SR=../scenario_runner
# run filesystem checks after installing
make check CARLA=../carla
cd ..
#####################################################
################## build everything #################
#####################################################
cd carla
make PythonAPI # build the PythonAPI (and LibCarla) again
make launch # launch in editor
make package # create an optimized package
make check # run Carla unit testsTechnically, the above prerequisites are all you really need to install DReyeVR and get a barebones VR ego-vehicle with no eyetracking and no racing wheel integration. If this suits your needs, simply skip down to the Install DReyeVR Core section of this doc and set the following variables in Unreal/CarlaUE4/Source/CarlaUE4/CarlaUE4.Build.cs to false:
/////////////////////////////////////////////////////////////
// Edit these variables to enable/disable features of DReyeVR
bool UseSRanipalPlugin = true;
bool UseLogitechPlugin = true;
...
/////////////////////////////////////////////////////////////- NOTE: you only need to install the SRanipal plugin if
UseSRanipalPluginis enabled, and similarly you only need to install the Logitech plugin ifUseLogitechPluginis enabled.
Before installing DReyeVR, we'll also need to install the dependencies:
- SteamVR: Required for VR
- SRanipal*: Required for eye tracking (with HTC Vive Pro Eye), optional otherwise
- LogitechWheelPlugin*: Required for Logitech Steering Wheel, optional otherwise
(* = optional, depends on the features you are looking for)
- You'll need to use SteamVR for the VR rendering environment, so you should first download the Steam client application.
- From within the steam client, you can browse in store->search "SteamVR" and download the free-to-install system utility.
- You should be able to launch SteamVR from the client and in the small pop-up window reach both settings and "show VR view"
- Make sure to calibrate the VR system to your setup and preferences!
- Additionally we recommend disabling the "Motion Smoothing" effect within SteamVR Settings to avoid nasty distortion artifacts during rendering.
-

- What is SRanipal?
- We are using HTC's SRanipal plugin as the means to communicate between Unreal Engine 4 and the Vive's Eye Tracker.
- To learn more about SRanipal and for first-time-setup, see this guide on foveated rendering using SRanipal by HTC developer MariosBikos_HTC
- You'll need a (free-to-create) Vive developer account to download the following:
- a)
VIVE_SRanipalInstaller_1.3.2.0.msi-- executable to install Tobii firmware - b)
SDK_v1.3.3.0.zip-- includes the Unreal plugin- IMPORTANT: The SRanipal versions above 1.3.6.0 are NOT supported and cause wild crashes!
- If the download links above don't work for you, make sure you have a Vive Developer account! (Or contact us directly to help you)
- a)
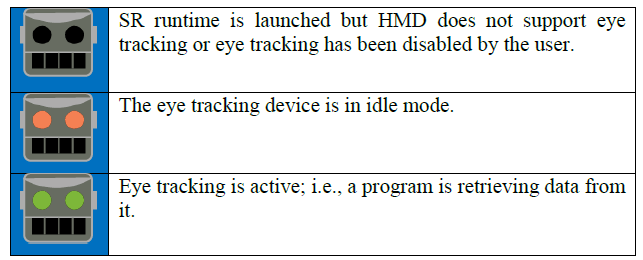
- Install the Tobii firmware by double-clicking the
.msiinstaller- Once installed, you should see the
SR_runtime.exeprogram available from the Start Menu. Launch it as administrator and you should see the robot head icon in the Windows system tray as follows: - Image Credit: MariosBikos
- Once installed, you should see the
- After downloading the
.zipfile, unzipping it should present a directory similar to this-
SDK - 01_C/ - 02_Unity/ - 03_Unreal/ - Eye_SRanipal_SDK_Guide.pdf - Lip_SRanipal_SDK_Guide.pdf - Then, unzip the SRanipal unreal plugin and copy over the
03_Unreal/Plugins/SRanipal/directory to the Carla installation -
# in SDK/ cd 03_Unreal unzip Vive-SRanipal-Unreal-Plugin.zip # creates the PLugins/SRanipal folder # assumes CARLA_ROOT is defined, else just use your Carla path cp -r Plugins/SRanipal $CARLA_ROOT/Unreal/CarlaUE4/Plugins/
-
- It is recommended to re-calibrate the SRanipal eye tracker plugin for every new participant in an experiment. You can do this by entering SteamVR home, and clicking the small icon in the bottom menu bar to calibrate eye tracker to the headset wearer.

- You can find more information by checking out this guide on foveated rendering using SRanipal by HTC developer MariosBikos_HTC

- This is only for those who have a Logitech steering wheel/pedals driving setup. This hardware is not required to experience the VR experience (you can simply use keyboard/mouse) but greatly adds to the immersion and allows for granular analog controls.
- For reference, we used this Logitech G923 Racing Wheel & Pedals.
- We'll be using this LogitechWheelPlugin to interact with UE4 and map hardware inputs to actions.
- Clone the repo and move the requisite folder to the Carla plugins folder
-
git clone https://github.com/HARPLab/LogitechWheelPlugin mv LogitechWheelPlugin/LogitechWheelPlugin $CARLA_ROOT/Unreal/CarlaUE4/Plugins - You should then see a Logitech Plugin enabled when you boot up the editor again:


- After installing these plugins, you should see a
Unreal/CarlaUE4/Pluginsthat looks like this: -
Plugins ├── Carla # unchanged │ └── ... ├── CarlaExporter # unchanged │ └── ... ├── LogitechWheelPlugin # if installed │ ├── Binaries │ ├── Doc │ ├── Logitech │ ├── LogitechWheelPlugin.uplugin │ ├── Resources │ └── Source └── SRanipal # if installed ├── Binaries ├── Config ├── Content ├── Resources ├── Source └── SRanipal.uplugin - If you still have questions or issues, feel free to post an issue on our Issues page and we'll try our best to help you out.
- IMPORTANT The installation requires that
make,pythonandgitare available on your shell. - You only need to install to a
CARLAdirectory, ScenarioRunner is optional.- If you don't provide the
makevariablesCARLA=...orSR=...the installation wizard will automatically detect your install destination by looking at the environment variablesCARLA_ROOTandSCENARIO_RUNNER_ROOTrequired by Carla.
- If you don't provide the
# the CARLA= and SR= variables are optional
make install CARLA=../carla SR=../scenario_runner
# or
make install CARLA=../carla
make install SR=../scenario_runner
# run filesystem checks after installing
make check CARLA=../carlaNOTE: to learn more about how the DReyeVR make system works, see Scripts/README.md
Using conda for the PythonAPI
- While not required for DReyeVR, we highly recommend compartmentalizing Python installations via isolated environments such as
anaconda- First download and install Anaconda to your machine from here.
# in /PATH/TO/CARLA/
conda create --name carla13 python=3.7.2
conda activate carla13 # will need to run this ONCE before opening a new terminal!
conda install numpy-
READ THIS FIRST (Linux): You might run into a problem when compiling Boost 1.72.0 (required by
LibCarla).Show instructions to get Anaconda working on Linux
-
Install
# find anaconda install: which python3 ... PATH/TO/ANACONDA/envs/carla/bin/python3 # example output # go to carla/install dir from here cd PATH/TO/ANACONDA/envs/carla/include # create a symlink between python3.7 -> python3.7m ln -s python3.7m python3.7
boost_1_72_0.tar.gzmanually from https://github.com/jerry73204/carla/releases/tag/fix-boost and place file inBuild/boost_1_72_0.tar.gzOpenUtil/BuildTools/Setup.sh(orUtil/BuildTools/Setup.baton Windows) Find the section namedGet boostincludes and comment out thewgetlines. Now when youmake LibCarlaagain, theboosterrors should be resolved.- For more information see the bottom of this SO post
-
READ THIS FIRST (Windows): Windows anaconda is a bit more of a pain to deal with.
Show instructions to get Anaconda working on Windows
- Enable your environment
conda activate carla13
- Add carla to "path" to locate the PythonAPI and ScenarioRunner. But since Anaconda does not use the traditional
PYTHONPATHyou'll need to:- 3.1. Create a file
carla.pthin\PATH\TO\ANACONDA\envs\carla\Lib\site-packages\ - 3.2. Insert the following content into
carla.pth:C:\PATH\TO\CARLA\PythonAPI\carla\dist C:\PATH\TO\CARLA\PythonAPI\carla\agents C:\PATH\TO\CARLA\PythonAPI\carla C:\PATH\TO\CARLA\PythonAPI C:\PATH\TO\CARLA\PythonAPI\examples C:\PATH\TO\SCENARIO_RUNNER\
- 3.1. Create a file
- Install the specific carla wheel (
whl) to Anacondaconda activate carla13 pip install --no-deps --force-reinstall PATH\TO\CARLA\PythonAPI\carla\dist\carla-0.9.13-cp37-cp37m-win_amd64.whl # if applicable (and you installed Scenario runner) cd %SCENARIO_RUNNER_ROOT% pip install -r requirements.txt # install all SR dependencies
- Finally, you might run into problems with
shapely(scenario-runner dependency) and Conda. Luckily the solution is simple:- Copy the files:
PATH\TO\ANACONDA\envs\carla13\Lib\site-packages\shapely\DLLs\geos.dllPATH\TO\ANACONDA\envs\carla13\Lib\site-packages\shapely\DLLs\geos_c.dll
- To destination:
PATH\TO\ANACONDA\envs\carla13\Library\bin\
- Copy the files:
- Now finally, you should be able to verify all PythonAPI actions work as expected via:
With all these imports passing (no error/warning messages), you're good to go!
conda activate carla13 python >>> Python 3.7.2 (default, Feb 21 2019, 17:35:59) [MSC v.1915 64 bit (AMD64)] :: Anaconda, Inc. on win32 >>> Type "help", "copyright", "credits" or "license" for more information. >>> import carla >>> from DReyeVR_utils import find_ego_vehicle >>> from scenario_runner import ScenarioRunner
- Enable your environment
-
Now you can finally build the PythonAPI to this isolated conda environment.
conda activate carla13
(carla13) make PythonAPI # builds LibCarla and PythonAPI to your (conda) python environment- NOTE: You'll need to run
conda activate carla13every time you open a new terminal if you want to build DReyeVR since the shell needs to know which python environment to use. Luckily this minor inconvenience saves us from the significant headaches that arise when dealing with multiplepythonprojects, Carla installations, and versions, etc.
It is nice to verify that the Carla PythonAPI is correctly visible in conda, to do this you should see all the following attributes in the carla module once calling dir on it.
Show instructions to verify Carla PythonAPI is installed
# in your terminal (linux) or cmd (Windows)
conda activate carla13 # (if using conda)
(carla13) python # should default to python3!!#in Python
...
>>> import carla
>>> dir(carla)
# the following output means carla is not correctly installed :(
>>> ['__doc__', '__file__', '__loader__', '__name__', '__package__', '__path__', '__spec__']
# OR the following output means carla is installed :)
>>> ['Actor', 'ActorAttribute', 'ActorAttributeType', 'ActorBlueprint', 'ActorList', 'ActorSnapshot', 'ActorState', 'AttachmentType', 'BlueprintLibrary', 'BoundingBox', 'CityObjectLabel', 'Client', 'ClientSideSensor', 'CollisionEvent', 'Color', 'ColorConverter', 'DReyeVREvent', 'DVSEvent', 'DVSEventArray', 'DebugHelper', 'EnvironmentObject', 'FakeImage', 'FloatColor', 'GearPhysicsControl', 'GeoLocation', 'GnssMeasurement', 'IMUMeasurement', 'Image', 'Junction', 'LabelledPoint', 'Landmark', 'LandmarkOrientation', 'LandmarkType', 'LaneChange', 'LaneInvasionEvent', 'LaneInvasionSensor', 'LaneMarking', 'LaneMarkingColor', 'LaneMarkingType', 'LaneType', 'LidarDetection', 'LidarMeasurement', 'Light', 'LightGroup', 'LightManager', 'LightState', 'Location', 'Map', 'MapLayer', 'MaterialParameter', 'ObstacleDetectionEvent', 'OpendriveGenerationParameters', 'OpticalFlowImage', 'OpticalFlowPixel', 'Osm2Odr', 'Osm2OdrSettings', 'RadarDetection', 'RadarMeasurement', 'Rotation', 'SemanticLidarDetection', 'SemanticLidarMeasurement', 'Sensor', 'SensorData', 'ServerSideSensor', 'TextureColor', 'TextureFloatColor', 'Timestamp', 'TrafficLight', 'TrafficLightState', 'TrafficManager', 'TrafficSign', 'Transform', 'Vector2D', 'Vector3D', 'Vehicle', 'VehicleControl', 'VehicleDoor', 'VehicleLightState', 'VehiclePhysicsControl', 'VehicleWheelLocation', 'Walker', 'WalkerAIController', 'WalkerBoneControlIn', 'WalkerBoneControlOut', 'WalkerControl', 'Waypoint', 'WeatherParameters', 'WheelPhysicsControl', 'World', 'WorldSettings', 'WorldSnapshot', '__builtins__', '__cached__', '__doc__', '__file__', '__loader__', '__name__', '__package__', '__path__', '__spec__', 'bone_transform', 'bone_transform_out', 'command', 'libcarla', 'vector_of_bones', 'vector_of_bones_out', 'vector_of_gears', 'vector_of_ints', 'vector_of_transform', 'vector_of_vector2D', 'vector_of_wheels']Additionally, if you make changes to the PythonAPI source and need to rebuild (make PythonAPI again) when using Conda you should reinstall the .whl file to ensure your changes will be reflected in the environment:
-
conda activate carla pip install --no-deps --force-reinstall /PATH/TO/CARLA/PythonAPI/carla/dist/carla-YOUR_VERSION.whl
If you currently have an older version of DReyeVR installed and want to upgrade to a newer version, it is best to re-install DReyeVR from a fresh Carla repository. You can manually delete the carla repository and re-clone it directly (carefully ensuring the versions match) or use our provided scripts which attempt to reset the repository for you:
Show instructions to use DReyeVR scripts to reset CARLA repo
IMPORTANT: the DReyeVR clean script will overwrite and reset the Carla repository you specify, so make your backups now if you have any unstaged code. (git reset --hard HEAD and git clean -fd will be invoked, so if you commit your local changes they will be safe)
# first go to CARLA and clean it so no old DReyeVR builds linger
cd /PATH/TO/Carla/
make clean
# it is a good idea to clean the Content/ directory which is not tracked by Carla's git system
rm -rf Unreal/CarlaUE4/Content/
# re-install the Content fresh from Carla's servers
./Update.sh # Linux/Mac
Update.bat # Windows
# next, go to DReyeVR and get the latest updates
cd /PATH/TO/DReyeVR/
git pull origin main # or dev, or whatever branch
# next, run the DReyeVR-cleaner to automatically hard-reset the Carla repo
# accept the prompt to hard-clean CARLA, note that this will reset tracked and remove untracked files
make clean CARLA=/PATH/TO/CARLA SR=/PATH/TO/SR # both args are optional
# now, you can cleanly install DReyeVR over Carla again
make install CARLA=/PATH/TO/CARLA SR=/PATH/TO/SR # both args are optional
# it's a good idea to check that the Carla repository has all the expected files
make check CARLA=/PATH/TO/CARLA SR=/PATH/TO/SR # both args are optional
# finally, you can go back to Carla and rebuild
cd /PATH/TO/Carla
make PythonAPI
make launch
make packageAs long as you have no errors in the previous sections, you should be able to just build the Carla project with our DReyeVR files as follows:
If you are not interested in using SRanipal or the LogitechWheelPlugin, you can disable these at compile-time by changing the variables in Unreal/CarlaUE4/Source/CarlaUE4/CarlaUE4.Build.cs to false:
/////////////////////////////////////////////////////////////
// Edit these variables to enable/disable features of DReyeVR
bool UseSRanipalPlugin = true;
bool UseLogitechPlugin = true;
...
/////////////////////////////////////////////////////////////Finally, open the project directory in any terminal (Linux/Mac) or Windows x64 Native Tools Command Prompt for VS 2019 (Windows) and run:
make PythonAPI # build the PythonAPI & LibCarla
make launch # build the development UE4 game in editor
make package # build the optimized UE4 packaged game (shipping)With the shipping package built, run the Carla (with DReyeVR installed) executable in VR mode with:
# on Unix
cd /PATH/TO/CARLA/Dist/CARLA_Shipping_0.9.13-dirty/LinuxNoEditor/ # or MacNoEditor on MacOS
./CarlaUE4.sh -vr
# on Windows x64 Visual C++ Toolset
cd \PATH\TO\CARLA\Build\UE4Carla\0.9.13-dirty\WindowsNoEditor\
CarlaUE4.exe -vr
# Optional flag: -quality-level=LowNOTE: To greatly boost the framerates without losing much visual fidelity you can run with the additional argument -quality-level=Low which we modified from vanilla Carla to preserve the same rendering distance.
NOTE 2 You also don't necessarily NEED to run DReyeVR in VR. If you omit the -vr flag then you will be greeted with a flat-screen Carla game with the same features available for DReyeVR, just not in VR.
Now that you've successfully installed DReyeVR continue to Usage.md to learn how to use DReyeVR for your own VR driving research simulator.