This repository contains the implementation of a path tracking system using the following algorithm in ROS:
-
Pure Pursuit Control
- The current implementation does not accommodate reverse motions.
- Sharp turns and U-turns require tuning of the parameters like lookahead distance and speed. This will be considered when adding lane centering.
- Steering is restricted within a certain range to prevent circular movements.
- Overview
- Limitations
- Requirements
- Setup
- ToDo List
- Controllers Background
- System Architecture
- Design Choices
- The controller is implemented on the Polaris GEM e2 Simulator found at Polaris GEM e2.
- System: Ubuntu 20.04 + ROS Noetic
-
Assuming the same workspace as used by the Polaris GEM e2 Simulator, clone the repository in the workspace and compile:
$ cd ~/gem_ws/src $ git clone https://github.com/Gowresh7/path_tracking.git $ cd ~/gem_ws $ catkin_make $ source devel/setup.bash
-
Use the given launch file to launch the simulation along with path tracking node, tf publisher node, and Rviz. Around 5 seconds after the simulation launches, a default path will be published for the robot to follow:
$ roslaunch path_tracking path_tracking_sim.launch
- Build using the given Dockerfile and use the docker_run.sh script for Linux systems.
- For Windows, use the same Dockerfile and additionally install Xserver for remote display
- Implement Pure Pursuit Controller
- Implement State Machines
- Visualize States as markers
- Visualize Path Trajectory taken by vehicle
- Implement Lane Centering
- Implement Stanley Controller
- Implement MPC
The Pure Pursuit algorithm is a popular path-tracking method for vehicles with Ackermann steering (like cars). It is designed to steer the vehicle towards a target point, known as the lookahead point, on a given path. The algorithm calculates the curvature of this arc to determine the appropriate steering angle using the following equation:
Where:
- δ is the steering angle of the vehicle.
- L is the wheelbase of the vehicle (the distance between the front and rear axles).
- y is the lateral offset of the lookahead point in the vehicle's coordinate frame.
- d is the distance between the vehicle and the lookahead point.
-
The path tracking system is built around three main components:
-
- An abstract base class that defines the interface for any path-tracking controller.
-
- A specific implementation of the path-tracking controller using the Pure Pursuit algorithm.
-
- The main ROS node that handles subscribing to necessary topics, publishing control commands, and managing the state of the robot.
-
-
-
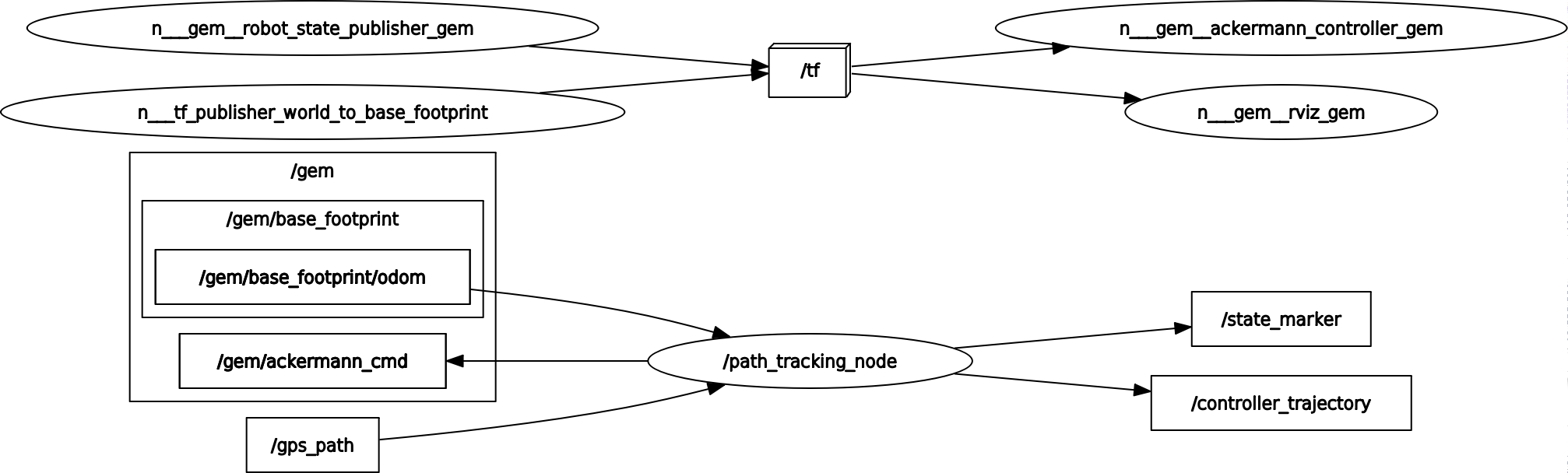
The system is designed to interact with the robot and environment through ROS topics:
-
- /gps_path: Input Path of type nav_msgs::Path in 'world' frame for the robot to follow.
- /gem/base_footprint/odom: Odometry data given by the gazebo simulator in 'world' frame.
-
- /gem/ackermann_cmd: Control data of type ackermann_msgs::AckermannDrive to send speed and steering angle to the robot.
- /state_marker: Visualization marker of type visualization_msgs::Marker to showcase the robot's current state.
- /controller_trajectory: Path message of type nav_msgs::Path to visualize the vehicle trajectory.
-
- lookahead_distance: Determines how far ahead the robot looks on the path to calculate the steering angle. Default is 6.0 meters.
- vehicle_speed: The speed at which the robot should travel while tracking the path. Default is 2.8 meters/second.
- wheelbase: The distance between the front and rear axles of the robot. Default is 1.75 meters.
- controller_type: Specifies the type of controller to use. Currently defaults to "PURE_PURSUIT".
-
- For the initial implementation, the Pure Pursuit Algorithm was chosen for its relatively simple logic, which calculates the steering angle based on a lookahead point on the input path.
- Considering the future implementations of other controller algorithms like Stanley, MPC, etc., a modular architecture was followed to develop the code. This allows for easy implementation and integration of the different path tracking controllers. The 'PathTrackingController' base class ensures that any derived controller can implement the 'computeControl' function using the robot's odometry, path, and other parameters as input to output the necessary control commands.
- To better manage the robot's behavior at various stages, an enumerated State was used to manage the robot's current state (IDLE, TRACKING, GOAL_REACHED, ERROR). This design allows the system to react appropriately based on the robot's progress along the path, handle errors gracefully, and stop the robot when the goal is reached.
- Parameters such as 'lookahead_distance', 'vehicle_speed', 'wheelbase', and 'controller_type' are loaded through ROS parameters, making it easy to tune the system for different robots and environments without modifying the code.
- Additionally 'lookahead_distance', 'vehicle_speed', 'goal_tolerance' and 'steering_limits' are exposed thorugh the dynamic reconfigure servers to enable parameter tuning during runtime
- In order to showcase the current state of the robot at various stages of its behavior, visualization markers are published and can be viewed in Rviz.
- The predicted trajectory, based on the calculated steering angle is published as a path to visualize in Rviz.
- To enable better visualization in Rviz, a python node was created to provide transformations between /world frame and /base_footprint frame based on odometry data
- Another python node was created to publish various path messages as input to the Controller.