This repository implements some depth map estimation algorithm using 3D light fields, originally proposed by Kim et al. in Scene Reconstruction from High Spatio-Angular Resolution Light Fields (2013).
This program was made in the framework of the course Remote sensing: from sensor to large-scale geospatial data exploitation of the Master 2 MVA (ENS Paris-Saclay, Telecom ParisTech).
The Doxygen documentation for this project can be found in the branch gh-pages and is published under this website.
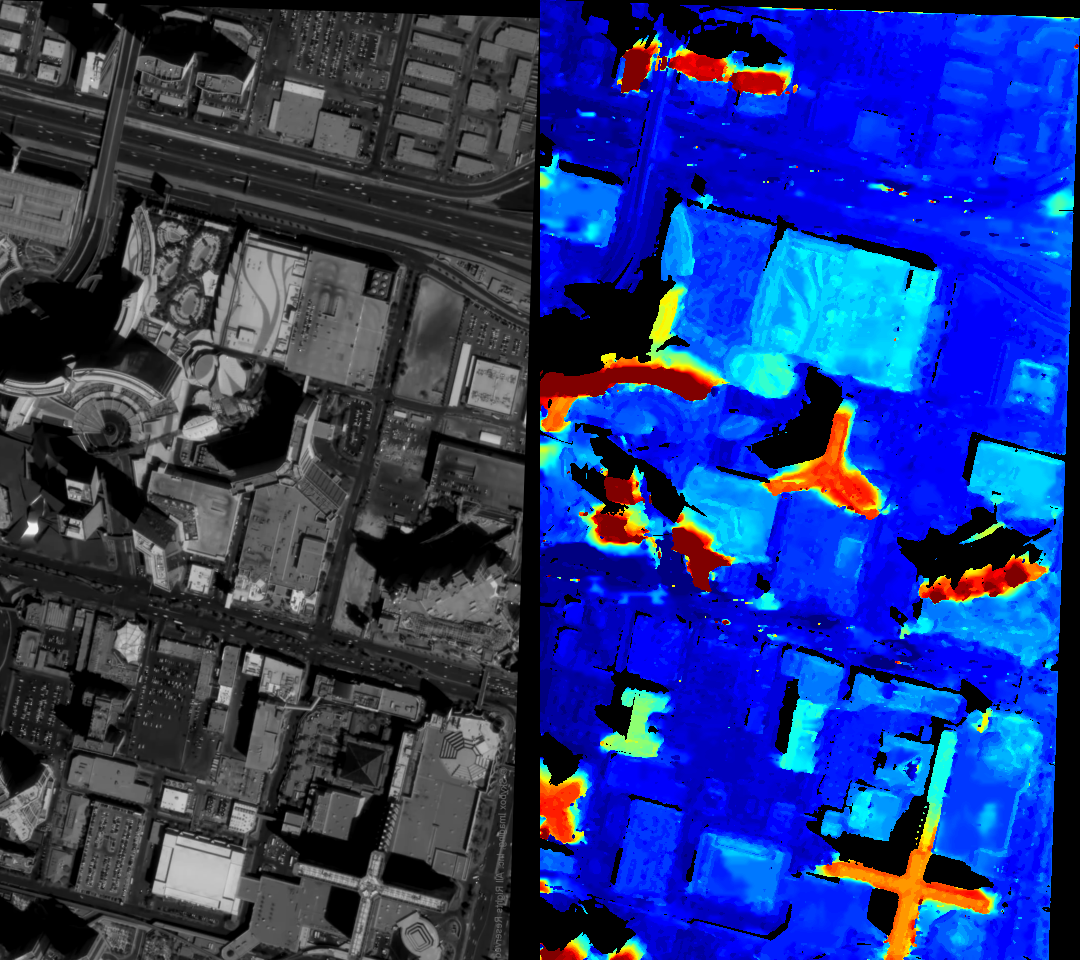
Some sample satellite image and the computed disparity map
-
OpenCV 3.x should be installed and findable.
-
The program should be compiled with C++11 standards. In particular, this program makes use of
<experimental/filesystem>and its corresponding librarystdc++fs. -
OpenMP.
Assume we are in the folder containing README.md. The following commands builds the library and the tests and run the library's "Hello World!".
mkdir build
cd build
cmake ../RSLightFields
make
./test_read_tiff 0
./test_read_tiff 1